greetings,
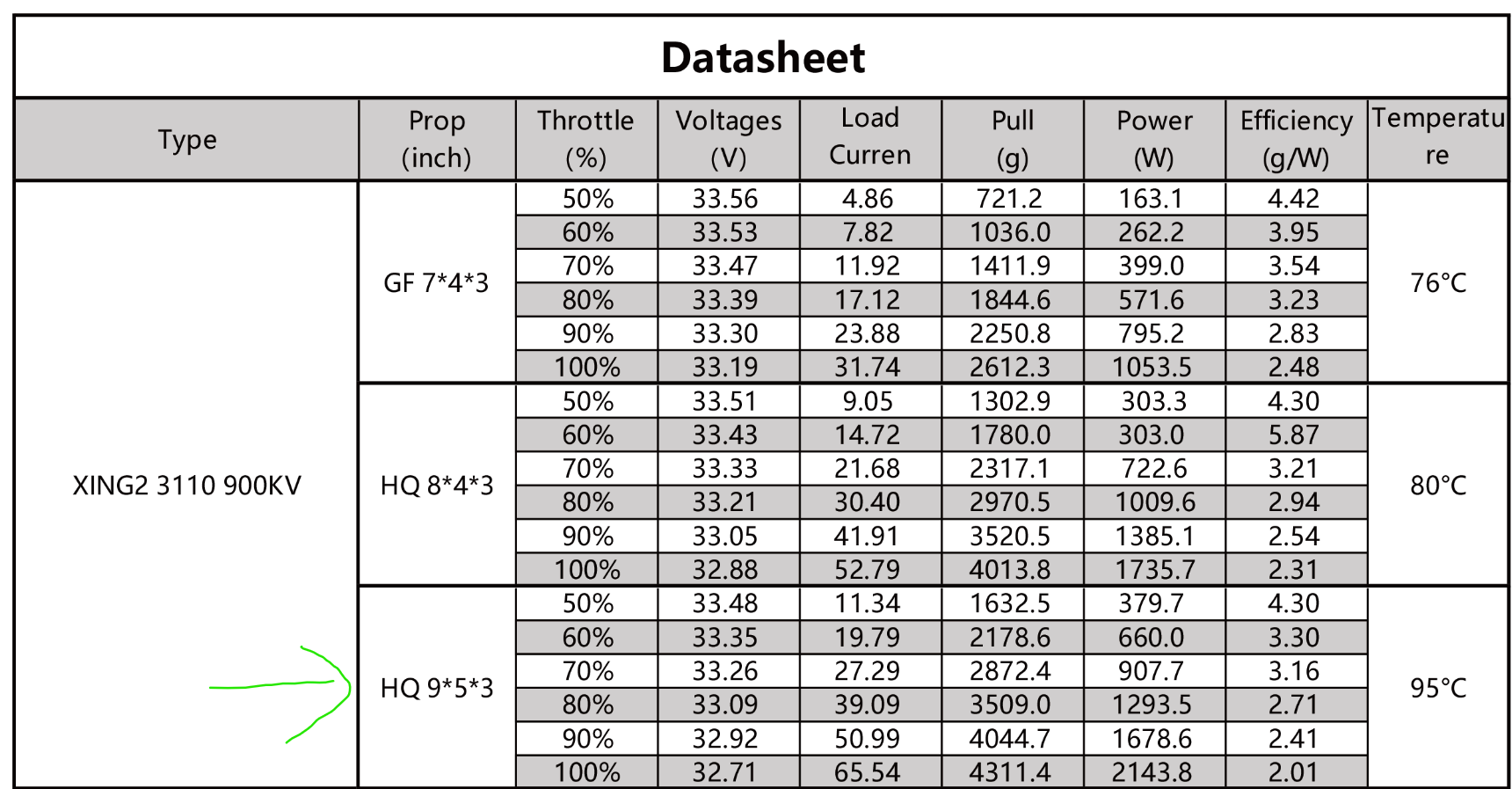
im trying to tune my x8 octo quad, 9 inch props, total weight 4 kg with batteries.
it flies okay in stabilize( not fully tuned) .
but its fails to take off in altitude hold or pos hold mode. throttle stick needs to put to high end to take off from ground, and then it come down and goes up again. very aggressive too drifting in XY plane as well even in the POS hold.
default tune ( maiden flight) cause fast oscillation in drone causes to motor heating.
but if i were to take off in stabilized and put into alt hold. its bit stable. but soon its starting to drop or go up without a stick command
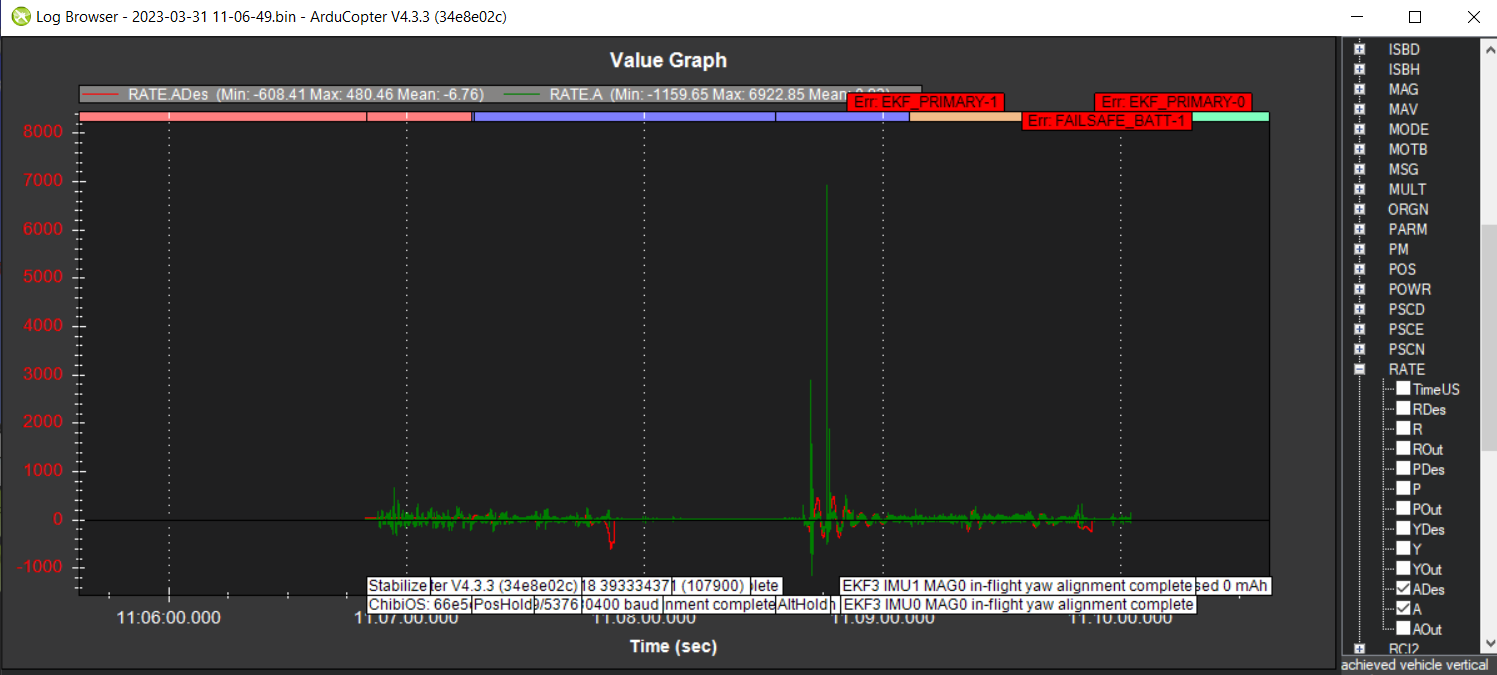
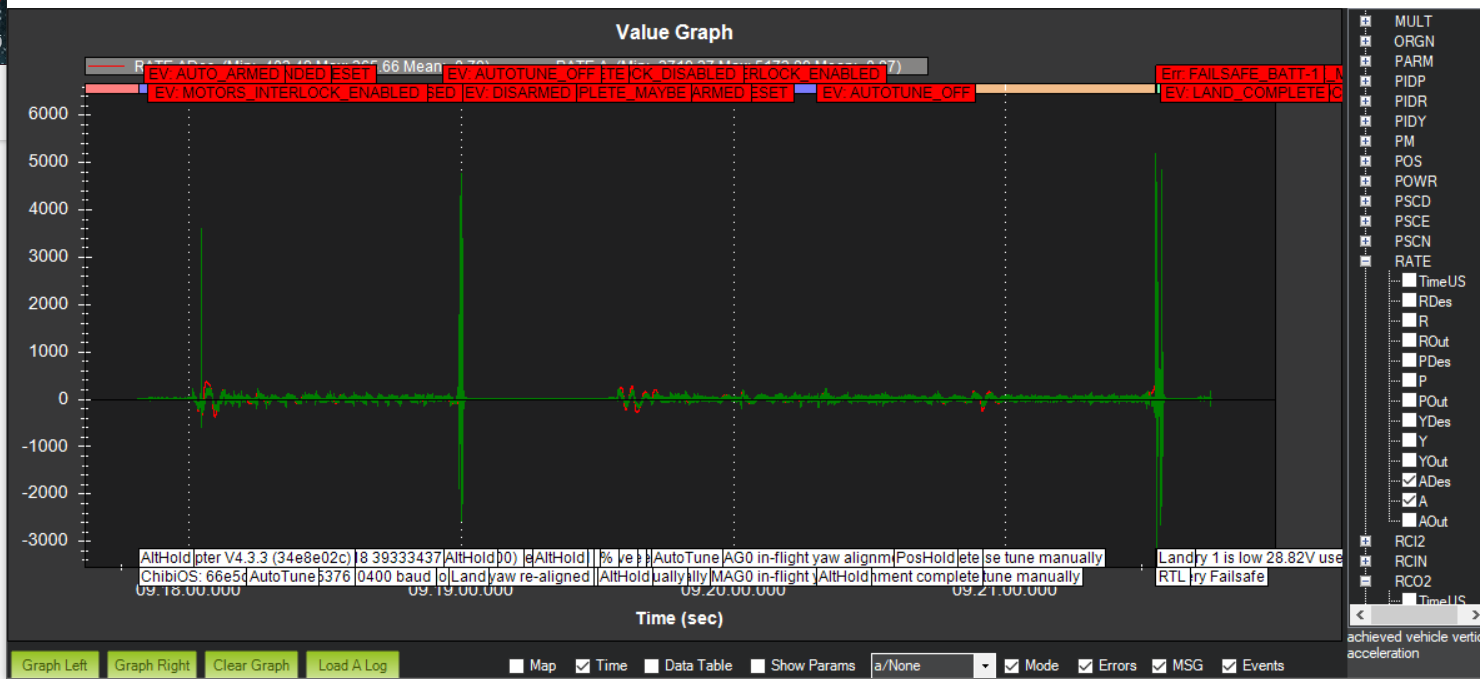
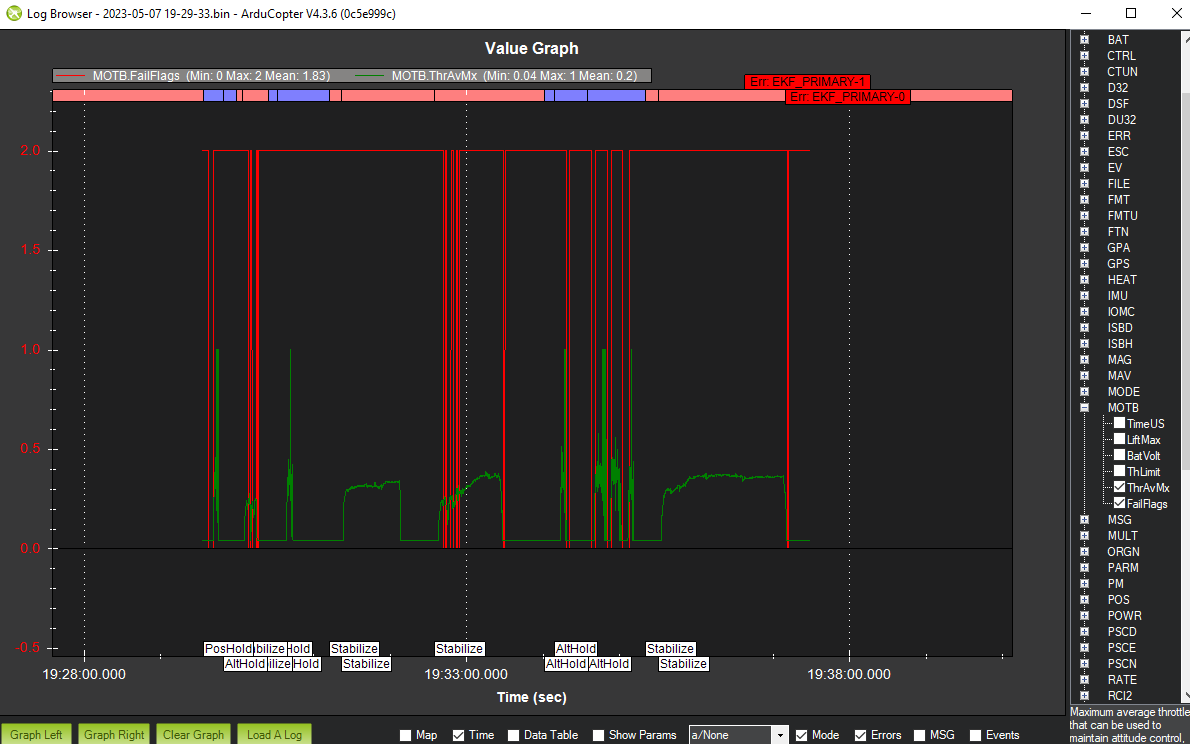
this bin log is when i took off in stabilize and put to alt hold
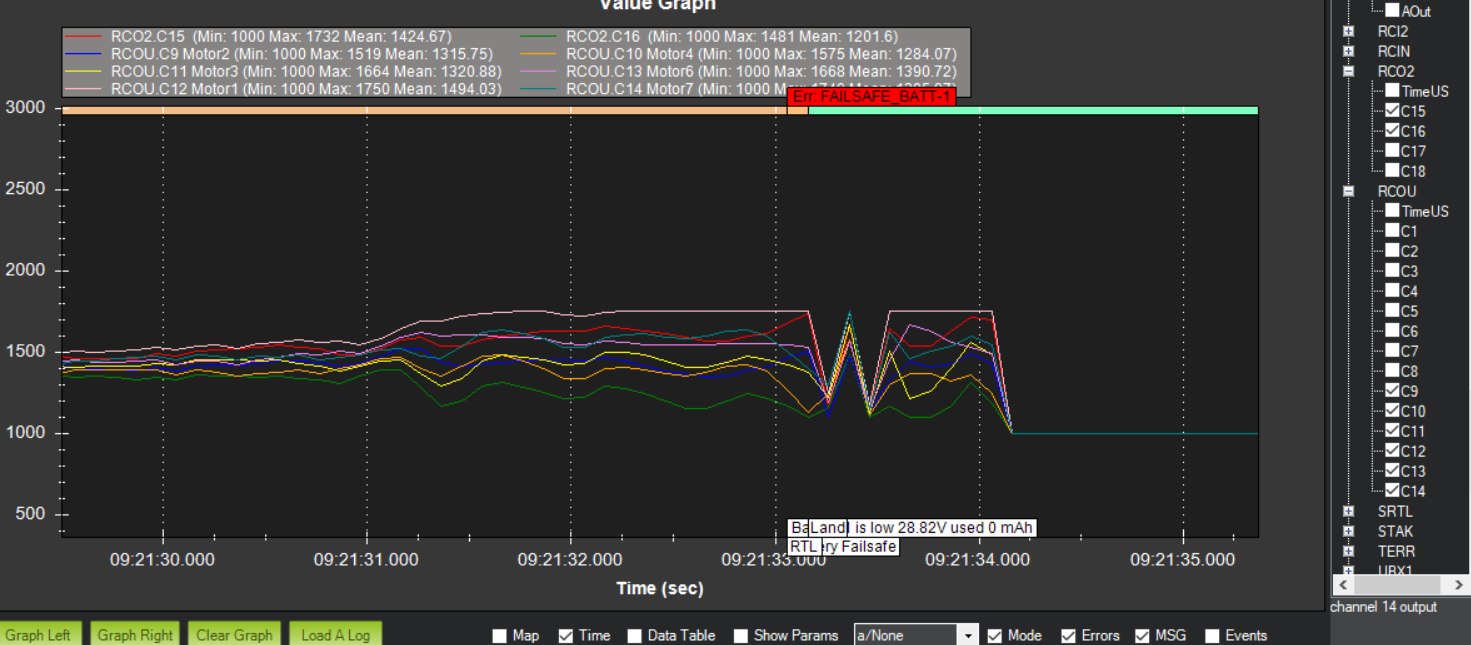
Servo12/Motor1 was commanded to maximum, meaning it may have been producing no thrust.
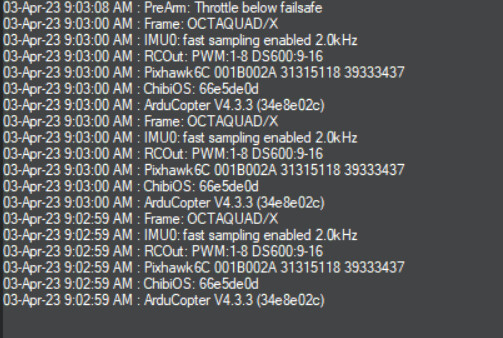
When you connect to MissionPlanner, what RCout message do you get?
Something like this example:
RCOut: PWM:1-8 DS600:9-14
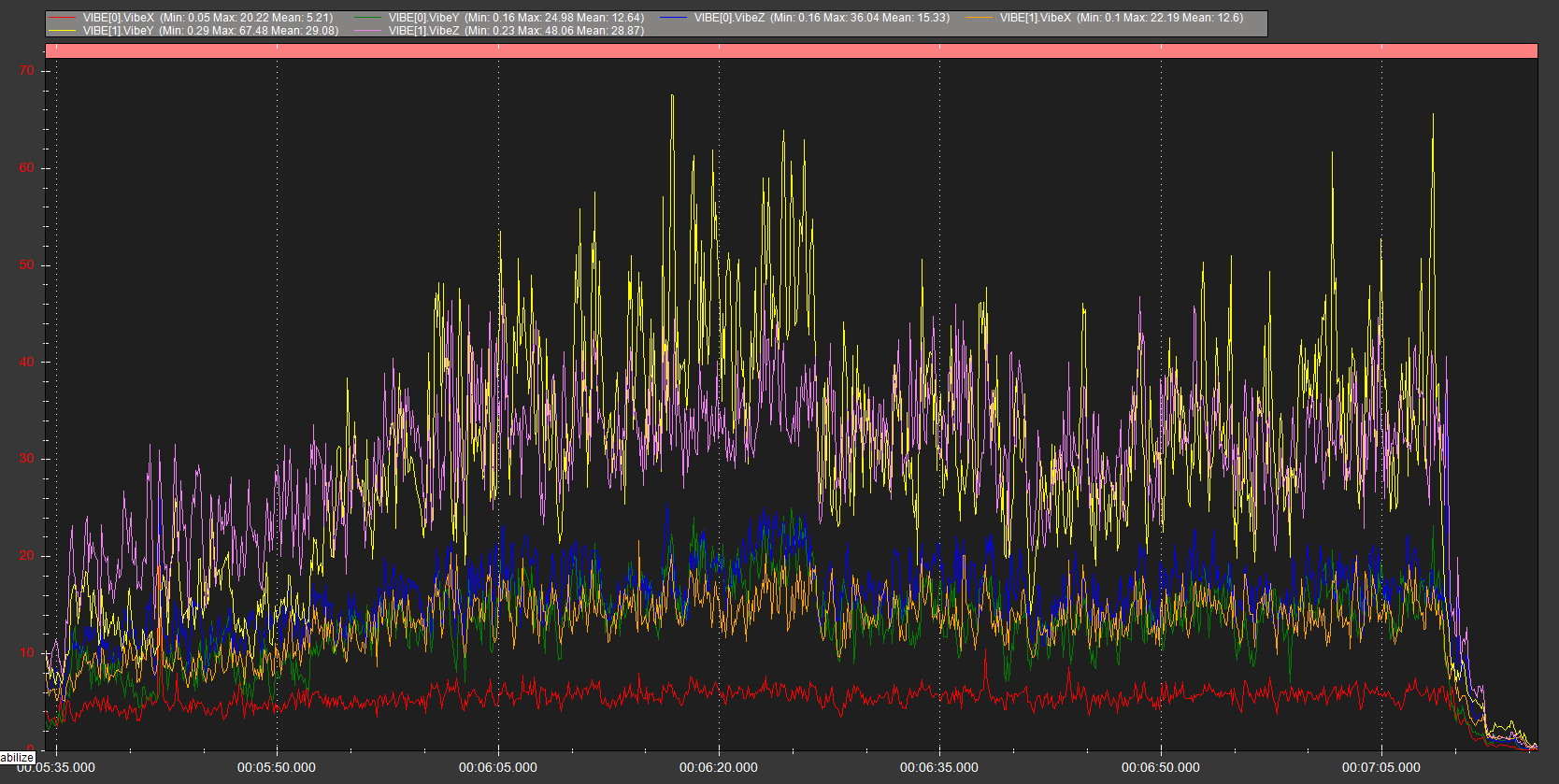
Vibrations are very high and it’s a wonder the copter was able to fly as well as it did. Work on the vibration isolation and prop balance before you fly again.
Also if you connect the telem wire of each ESC (and join them into 1) and connect to a RX pin of a spare serial port, you can have all the ESC telemtry data such as voltage, RPM, temperature.
One great advantage is setting the harmonic notch filter to work from the RPM.
Make sure this SERVO_BLH_POLES matches the number of pole for your motors
and set this (assumes Serial4 or Telem4, adjust to suit)
greetings,
i have replaced the burned motors, and updated the frimware to 4.3.6 along with the esc telemetry, blheli 32 settings, harmonic filters and other suggested pid settings as well.
also i have downgrade the lipos to 6 cell. and mot_spin_max to 0.65.
flying in stabilize mode is fine, no issues. but when switch to alt hold and poshold there are lot of issues going on , and the drone is going crazy.
every time i switch to alt hold or pos hold motors are being comanded to maximum ( 1650 in this case)
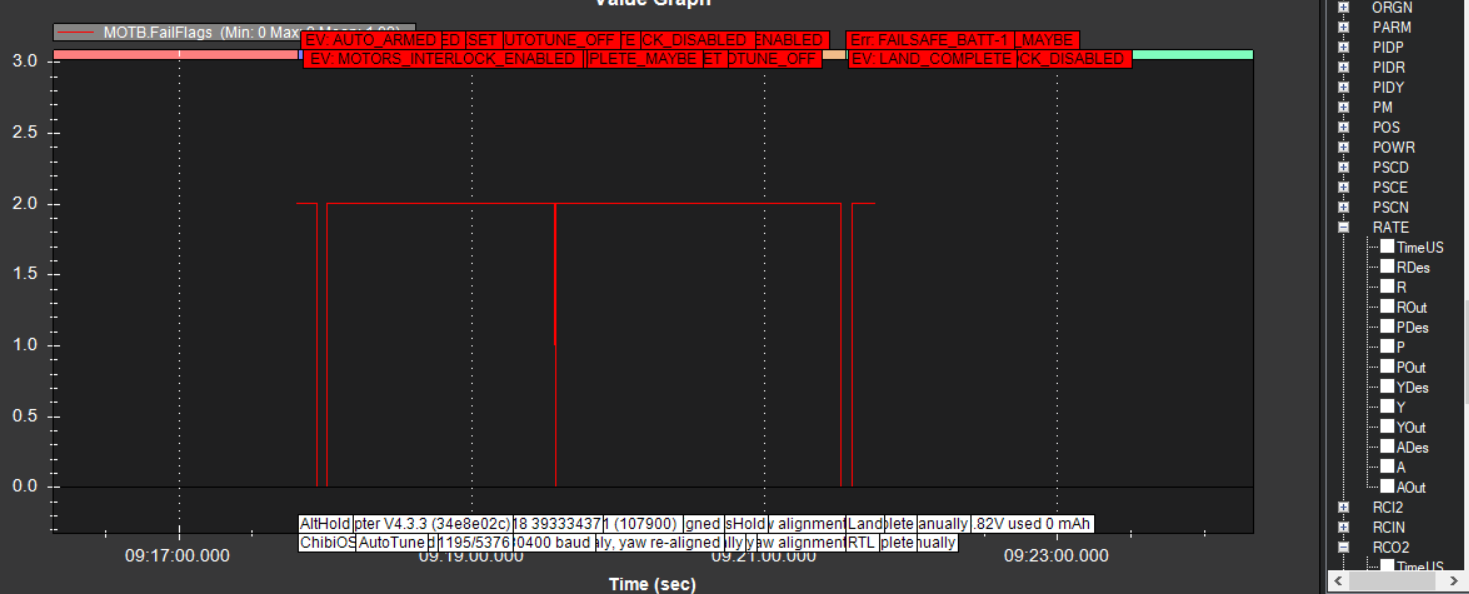
and the MOTB fail flags also arrives.
but when flying in stabilise average pwm range is about 1450 pwm.
also i have made and piloted other large quadcopters and hexacopters, i usually starts in alt hold mode. they are so smooth and sensitive to the throttle stick input ( on default parameters also )
but in this octo x8 quad throttle stick need to push to the almost upper limit to ascend the air craft.
any clue why this is happening ?.