Hi, recently I flew this X8 Octacopter, it was stored since march 2020, just created a simple grid mission and before reaching the first waypoint the copter started to roll uncontrolable, it felt from around 200m directly into the ground.
I´ve used this copter several times before without any issues and would like to find the cause or causes to prevent from happening again.
I’ve tried to analyze the log but may be someone more experienced can give me a hand to cheking out the log and pointing me in the right direction.
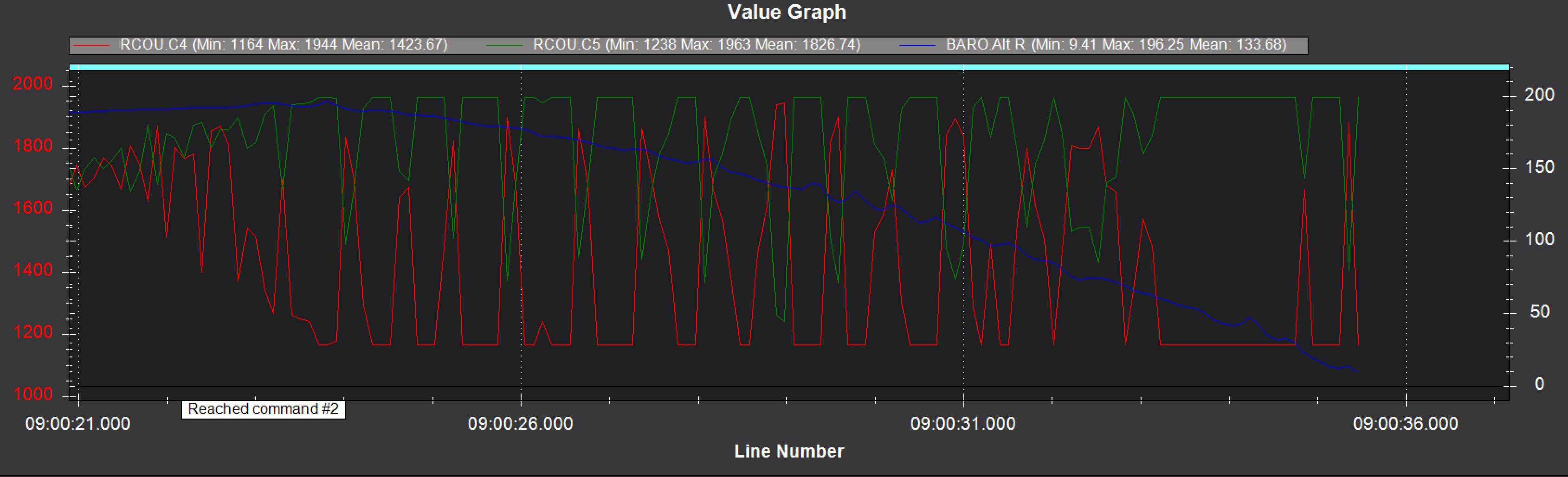
It looks like you are starting a bit underpowered. Then there was apparent thrust loss on Motor 5 with resulting drop in Motor 4 (opposite arm) trying to stabilize. General loss of thrust and stabilization and down she goes. Only 4&5 are shown here but you can graph the others, they are oscillating like mad trying to maintain stability.
Thanks for checking it out!,
Do you think it could also be a battery related issue? It’s the first time this happens to me, I don’t understand why the motor 2 didn’t increase his output to gain some stabilization?
It’s not a simple as that. This craft was somewhat underpowered/overweight to start with leaving less thrust headroom for stability under demand. Then when an event happens that reduces thrust there is little left for stabilization. If this was running current Stable Arducopter (why isn’t it?) there would have been “Thrust Loss” error messages to clue you in to a potential problem.
That makes a lot of sense. Before this incident the craft was working well, so I didn’t wanted to mess it up during any firmware update.
Thanks again for your help!