Try ATC_INPUT_TC,0.2 and see what you think about RC feel then. It wont change the actual PIDs/rates and so on, but it will smooth out the RC input more inline with carrying a gimbal.
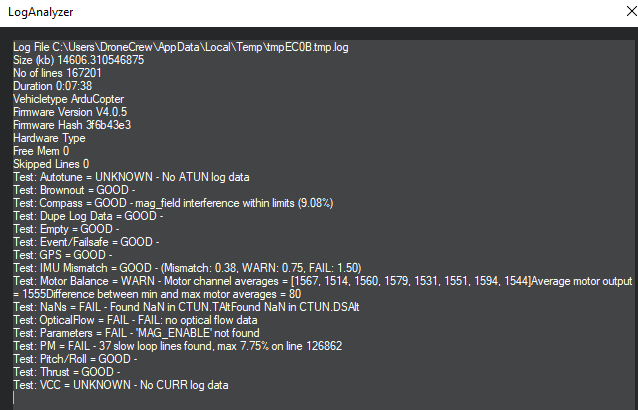
Set INS_HNTCH_REF,0.273 since you MOT_SPIN and MOT_THST_HOVER are all sorted out. Motor outputs look really good.
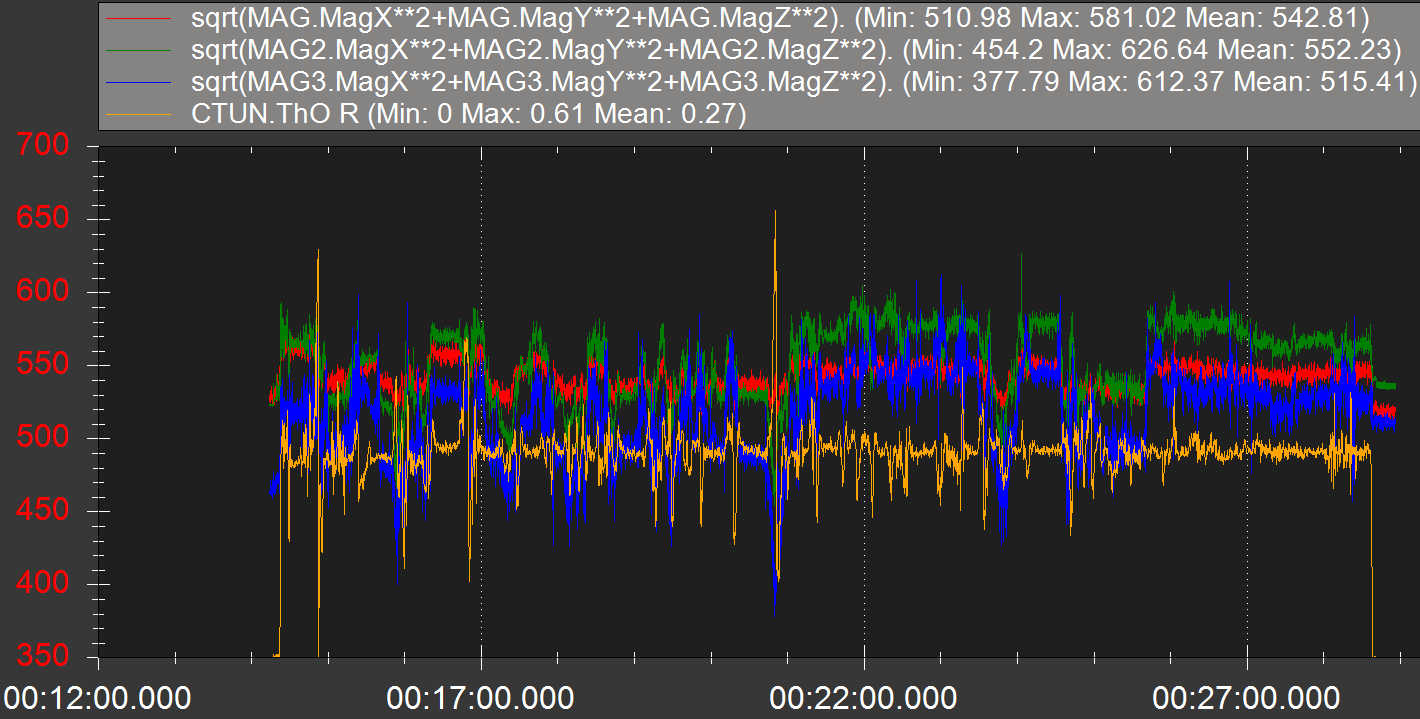
Just set COMPASS_USE3,0 since it is most affected by current draw/throttle, even though you’ve done the compass/motor calibration. Don’t worry about the Autoanalysis since it’s a bit outdated and you’ve got no compass related warnings appearing in the log.
I couldn’t see a problem with Altitude at all, It looks a lot better than the previous log. But that’s probably something you still need to visually check.
That Clip2 starts early on in the flight, there’s something vibrating. I think Clip 2 relates to the IMU that is not isolated, so it will be most affected.
There is a 72Hz peak in the FFT so you might need a static notch, but best to see if you can nail down the cause of the vibration first. Save the static notch as a last resort.
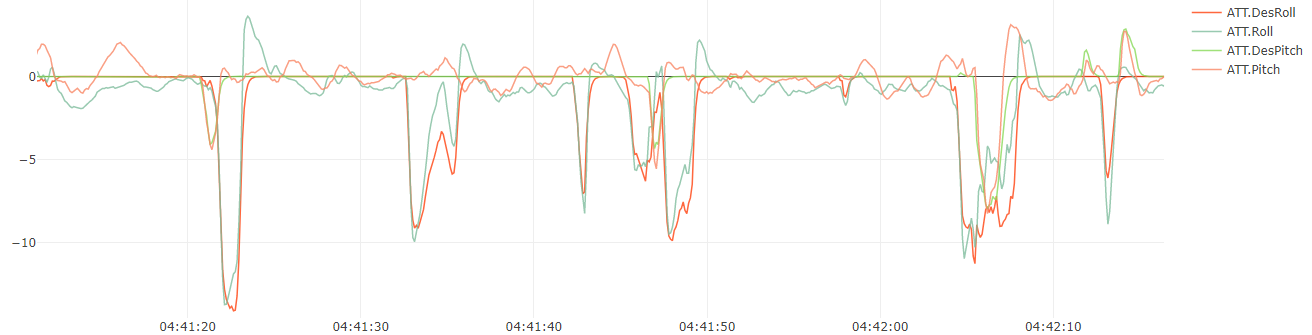
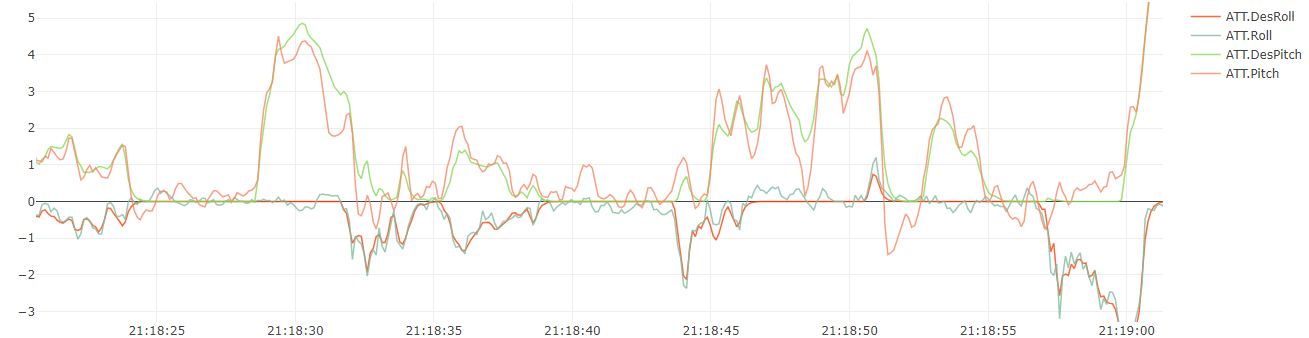
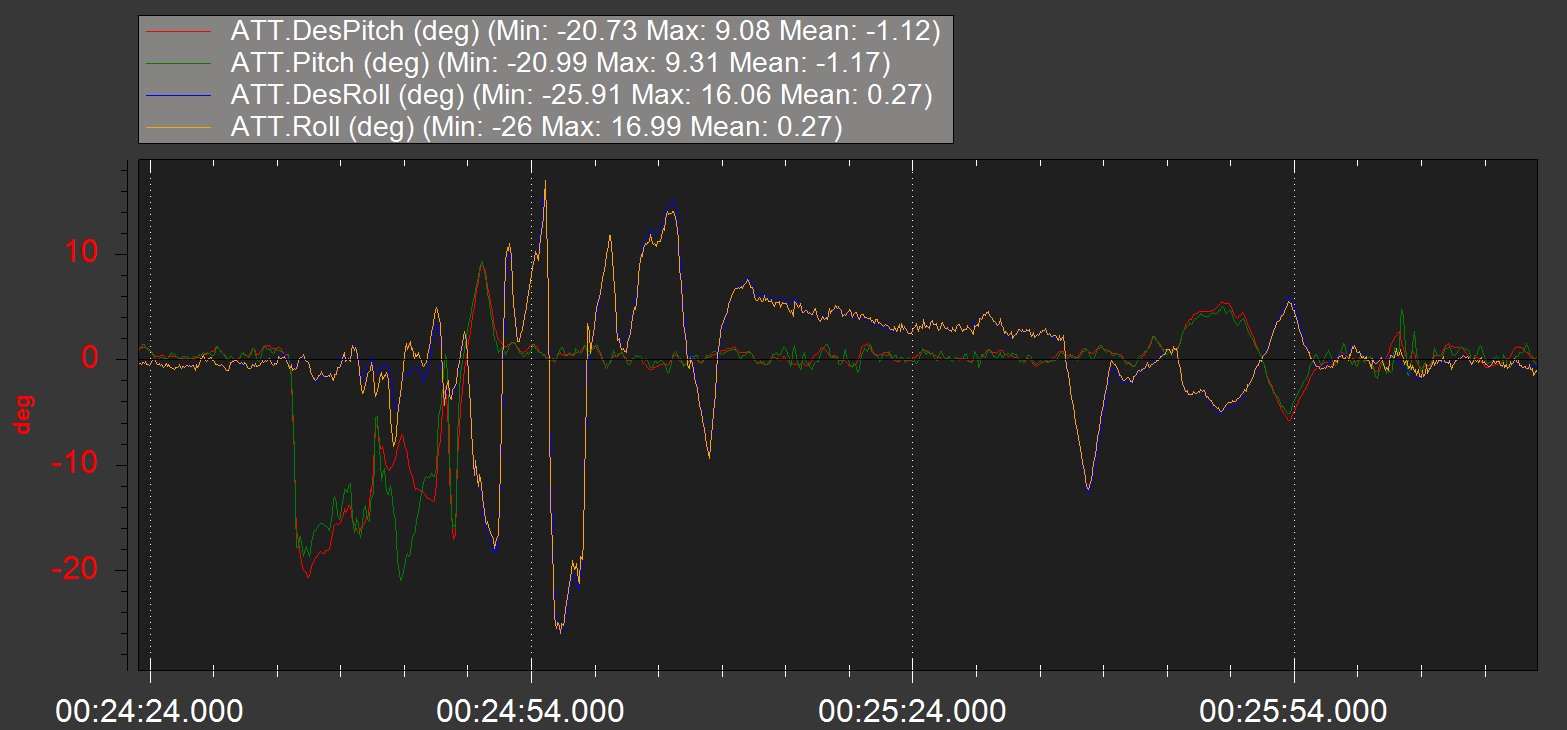
Yes, it is definitely twitchy. Attitude control looks a bit different this time.
Last log I looked at, excursions from desired happened mostly when the craft was meant to be level
This log, you see there’s still excursions in the first segment of this graph, but otherwise pitch and roll versus desired is tracking really well but noisy.
It’s getting trickier to fix now… Here’s what I’d do:
Lower all these to slow things down a little and filter more noise:
ATC_ACCEL_R_MAX,57000
ATC_ACCEL_P_MAX,27900
ATC_RAT_PIT_FLTD,15.00
ATC_RAT_PIT_FLTT,15.00
ATC_RAT_RLL_FLTD,15.00
ATC_RAT_RLL_FLTT,15.00
ATC_RAT_YAW_FLTT,15.00
INS_GYRO_FILTER,30.00
Test fly and re-examine logs - Maybe secure that gimbal and run Autotune again. You can always reduce the ATC_ACCEL values after Autotune.
If it’s not much better then you’re going to have to increase logging and start some more manual tuning.
LOG_BITMASK,180223