I upgraded the firmware on my 3DR X8 to AC3.3.3. I uploaded the stock parameter file for the X8 and reviewed the settings. From what I could tell everything looked reasonable. On the flight day I was connected to Mission Planner as well. I powered up the X8 and did not see any errors in the “Messages” tab, there was a 3D gps fix, and the HDOP was bellow 2. Everything on the ground looked good. The person who was manning the controls is an experienced pilot and armed the motors and increased the throttle. The X8 was very wobbly, which was expected, we were doing this flight to tune it. The X8 started to drift to the west, the pilot tried to nudge the X8 back east. Then it started flying full speed to the west. The pilot said he had no control, as he was trying just about everything on the transmitter and there was no response, it was not turning, or slowing down. It ended up crashing full speed into a concrete wall and was pretty much obliterated.
Now I would like to figure out what went wrong because it was kind of scary but I also don’t want to be stuck on old firmware.
The log entries I looked at were:
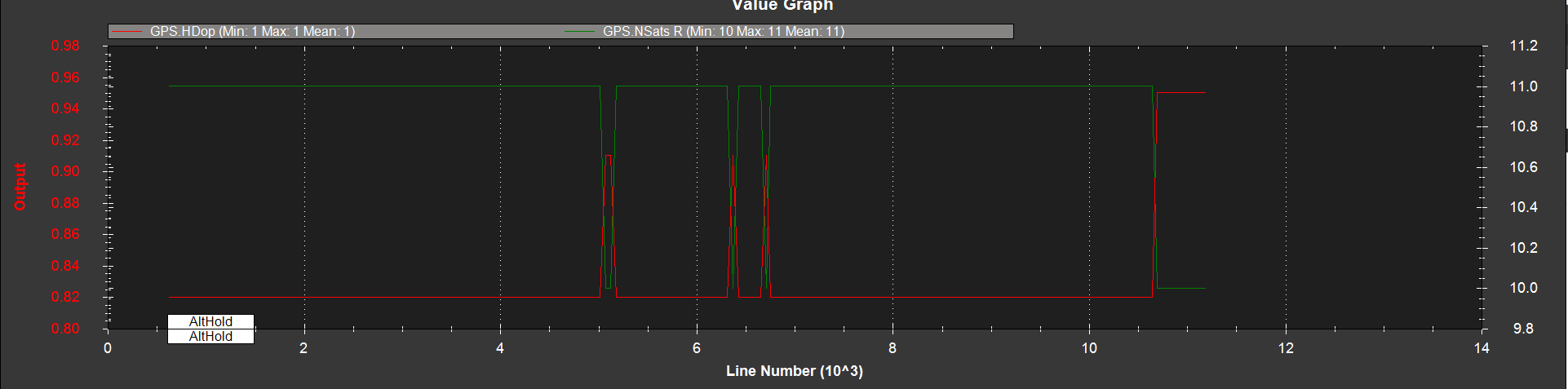
GPS: Some people that have had fly ways seem to have had issues with gps. I looked at the “GPS Glitch” option in the “Review Log” tool in Mission Planner. There is variations but the number of sats is between 10 and 11 and HDOP is between constantly less than 1. So that doesn’t seem to be the issue.
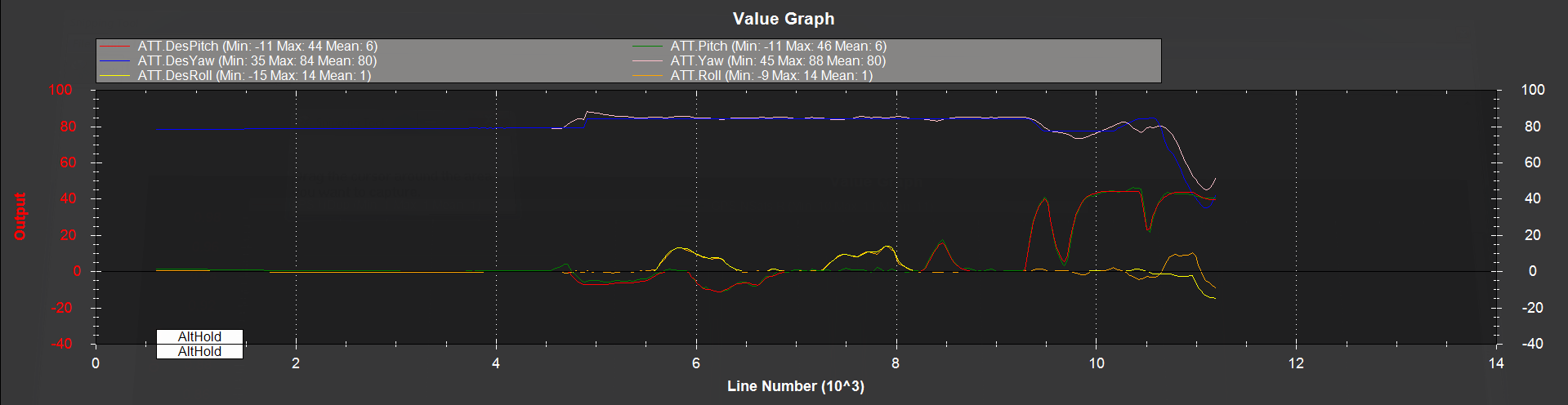
Attitude: I plotted the ATT desired pitch roll and yaw with the pitch roll and yaw. The pitch seemed alright, but there seemed to be some variation in the roll and yaw. I’m not entirely sure if that was after the crash or not or if the variation isn’t that bad.
I don’t really have a feeling for looking at the EKF stuff so I’m not sure what I’m looking for there.
Here is the log file from that day: 2016-05-11 09-50-44.bin (420 KB)
Any pointers here would be greatly appreciated. Thanks!
I looked at the logs and at the GPS plot and it looks like the copter was facing East when it started to fly off to the West. The Input shows full pitch forward and it did fly forward except it was flying off to the West. I think your copter is backwards and the flight controller is facing the wrong way.
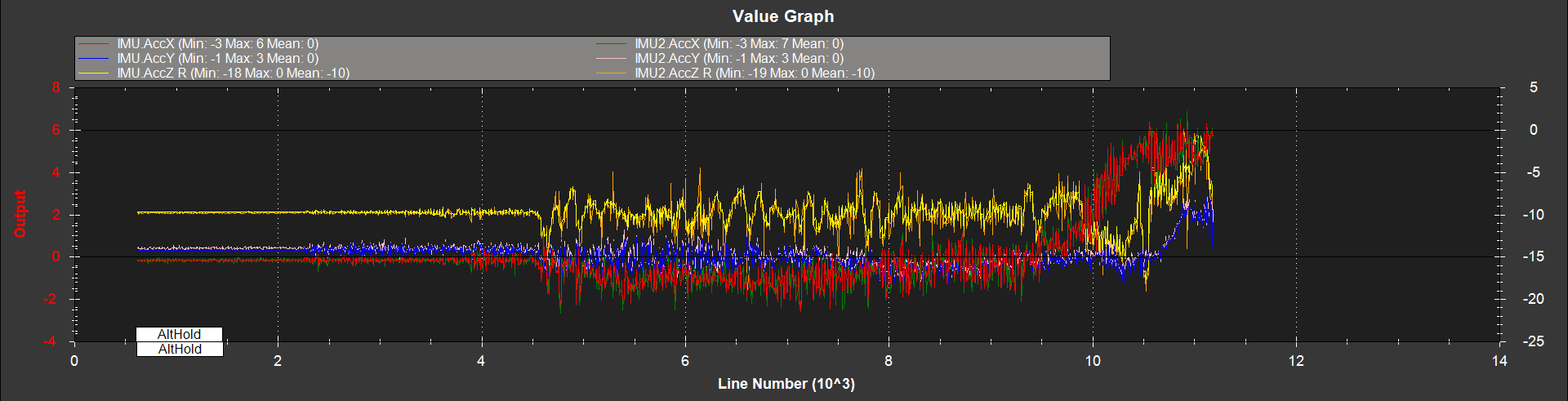
What I see is that your X vibrations started to go nuts. It’s possible your vibration damping came loose, and that cause the issue you saw. If you look at the Des.Roll vs Roll, the craft rolled right where the pilot commanded left. This matches up with something coming loose and causing the FC to receive bad data.
@iseries
Thanks for your reply! I must have glossed over the email update that there was a reply. This could have been the issue. Its odd because I just uploaded the param file from Mission Planner after upgrading the firmware. What I was worried about was there being changes in the new firmware that the old param file couldn’t be aware of. I never touched the mounting of the Pixhawk or the gps/compass. I’ll definitely have to look into this more. Thanks! It also didn’t help that my Land switch couldn’t work because the param file had the pwm setting set too low than what the controller was putting out. Lesson learned though!
@netphreak
My Pixhawk is mounted on foam squares. Is this what you mean by vibration damping coming loose? I see what you’re talking about with the Des.Roll and Roll. Thanks! These tips and the info to glean from them are very helpful! So maybe nothing was mounted backwards because from what I see, they both follow each other for the most part and then at the end they go off in their own directions, indicating some sort of hardware failure like my Pixhawk coming loose from old foam tape blocks like you are talking about?
@netphreak
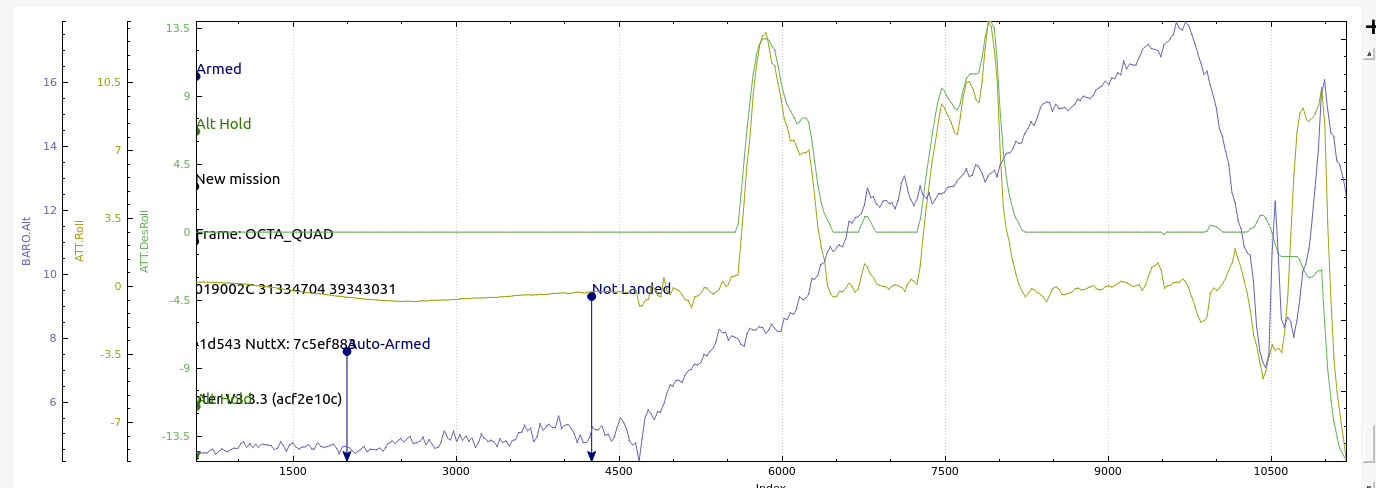
So that may also have been after the crash because if I plot the des.roll, roll, and alt, the altitude is going nuts there too and that may be part of the crash into the wall because at that point everything came loose because it was scattered.