I am buidling a 12-motor coaxial hexacopter and I am thinking on how to connect to Pixhawk. Until now, I just was thinking of using Y-cables to bundle the related ESC’s, but this seems not to work with my pixhawk. Searching the web doesn’t give me any conclusions if this is possible or not. As pixhawk uses plain PWM output, I don’t understand why it should not work. The alternative of using the AUX PWM ports on the Pixhawk seems also not a good option because of lack of failsafe and the fact that you have to manually setup the AUX ports in conjunction with the “normal” PWM outputs…
Any suggestions on this setup and even better, is there somebody who (succesfully) has build a similar setup?
Has anybody used more then 8 ESC’s on a Pixhawk?
Ok, this means, that you are using a coaxial setup, where the two motors on one arm are spinning in the same direction and not counter rotating.
Thanks, but I don’t want to use that kind of setup.
difficult at the moment but let me try to explain:
2 motors on 1 axle, so 1 upside down; although they turn both CW (clockwise) the fact that 1 is upside down, will result in your propellers turning in opposite directions, so 1 CW and 1 CCW… what I have been reading, is that this setup would be the most optimal (or least negative). I succeeded in getting this flying, but still need to do finetuning (did not had time to do autotune) and thanks to weather and other activities, I did not fly at all the last couple of months…
hi, i am trying to build something the same with T-Motor Antigravity 4006, can you please give me some tips specially on tuning, i saw a few videos on youtube with autoune option but couldn’t find that menu in my “Mission Planner” nor “Qground control”. also not always all those motors are starting at the same time !!! giving it more throttle will turn all of them on after a while
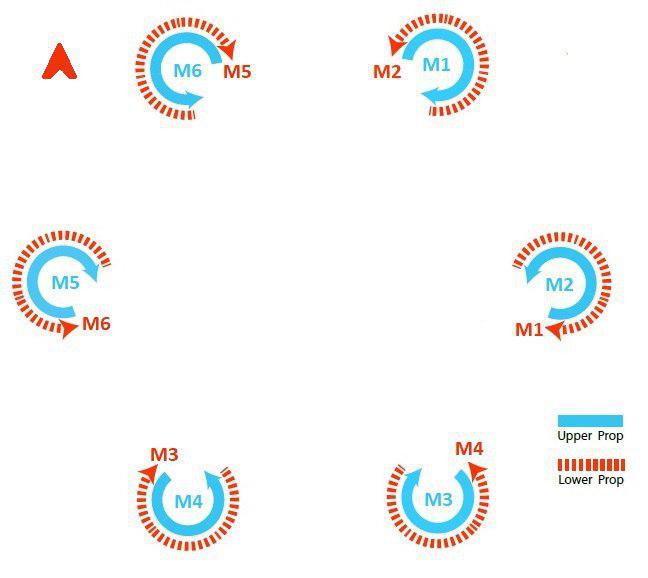
could you help me out here, take a look at this image witch is my motor layout, also i have a question about propellers you wrote “just to be clear: motors are not counter rotating but propellors are…” if i put a CW motor under the other it means that bottom ones will be CCW, should i change it?