You have: “PreArm: Compass not calibrated”
So take the whole rig, copter and ground station, outside and wait for a good GPS 3D Fix, then do the compass calibration.
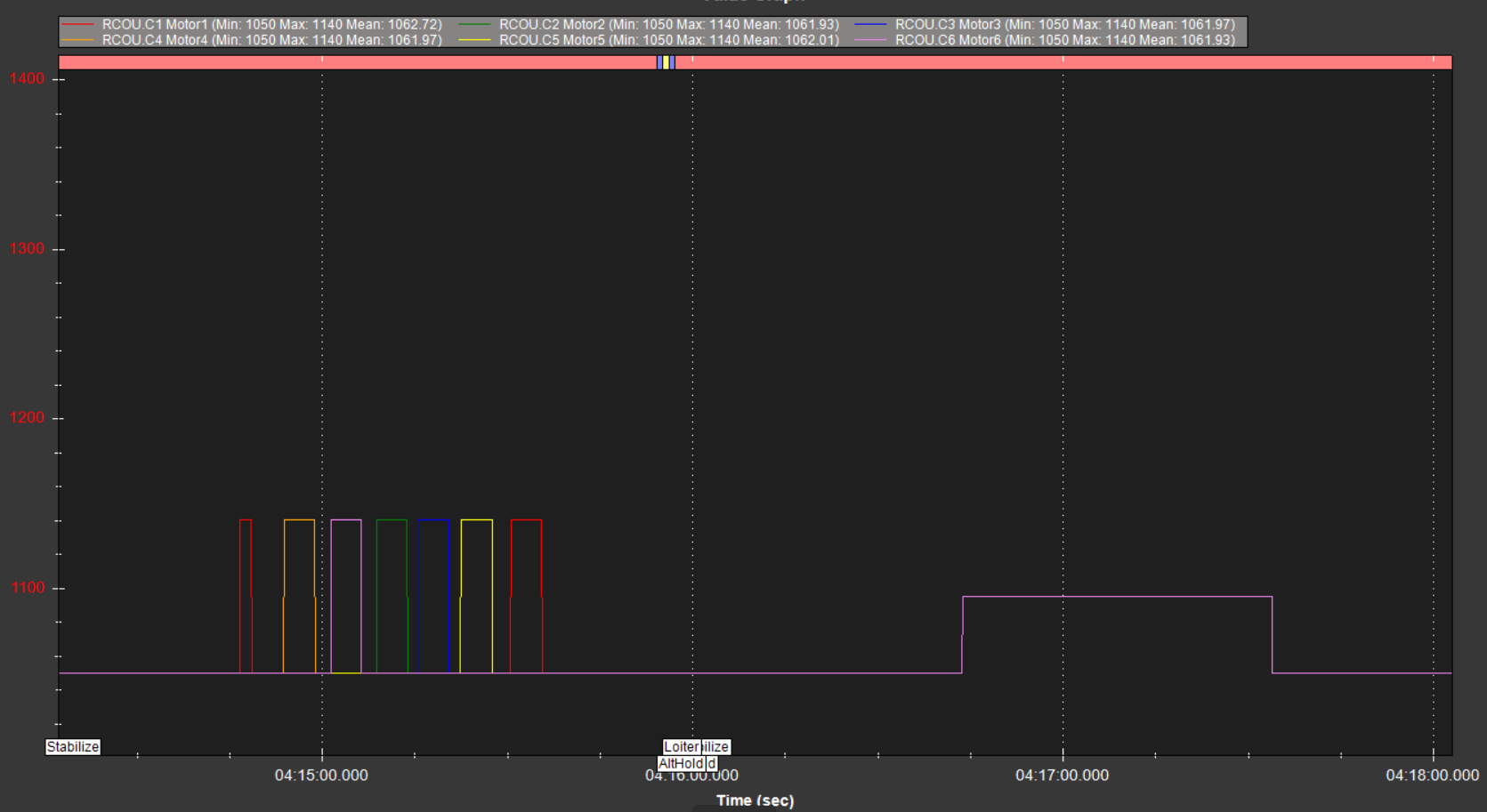
In that latest log we can see the motor tests so that is something.
If that didnt produce any spinning motors then the ESCs are not connected properly.
The frame type is set to a Hexa+ so make sure this is how the frame really is compared with Flight Controller orientation
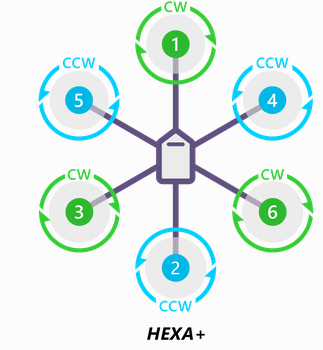
the more typical configuration is HexaX
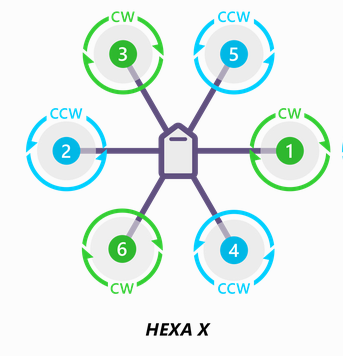
So be sure about that physical configuration before going further - the motor order and numbering is quite different.
See those motor numbers in the diagrams - they (or their ESCs) need to be connected to the Flight Controllers Main Out servo connectors with the same numbers - dont be confused by the Aux Out pins, ignore those for now. So Motor1 connects to MainOut 1 servo connector on the flight controller, and so on.

On the side of the carrier board with be " - + S "
The ground wire from each ESC, usually black, connects to it’s main out TOP ROW pin indicated by the minus sign.
The signal wire, usually white, connects to it’s main out BOTTOM ROW pin indicated by the S.
There should be nothing connected to the centre row of + pins.
For SAFETY take the props off, put some tape on the motor shafts or some indicator so you can easily tell which way they spin.
Now go back to MissionPlanner motor test and check all the motors work in the correct order. In motor test they have letters A, B, C … starting at front/right and going around clockwise.
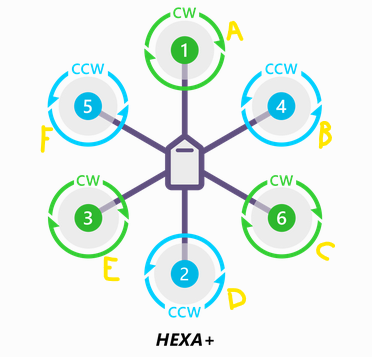
Once the motor order is correct, then change the spin of any motors if required, to match the clockwise or counter clockwise arrows in the diagram.
DO NOT go out trying to fly this copter yet
Next step is to get the battery voltage and current monitor working. This is quite important for safety and also helps tuning and stability.
You probably just have to go to the Full Parameter List and set
BATT_MONITOR 4
for voltage and current. Reboot the flight controller.
If you have the voltage sensor and regulator that came with the Cube then it should probably just work. In the MissionPlanner HUD you should now have a realistic, almost exact, battery voltage displayed when the battery is connected.
Let us know when you’ve done all that and we’ll move on to more steps before flight.