Hi!
Its my first post here. Last time when i was flying mine quad suddently it made a flip and uncontrolled felt down. When it was falling i tried to shut down motors (stabilize + disarm, before accident apm was in Loiter mode), unfortunately from point where it did flip i was unable to control it at all. After it felt motors was still running, and also i was unable to disarm, i had to remove lipo. It crashed twice in a row same way. The only difference was, at first accident motors shutdowned them self after crash (like brown out + reconnect sound from esc). The log doesnt says anything usefull, except gps glicht (ERR 2), but it suddently ends (like brownout?) Copter was after auto tune, weather was nice, before this 2 times it flied very often and fortunately with no crash. In last crash i destroyed 2 cameras, and frame. Today i flied w/o stuff (only PM,Telemetry), it flied well, no crash but i was scared to put it in loiter. The question is: Can compass/gps failure affect such sudden reaction that may crash copter? Maybe youll see something in log.
PS. Ive tested copter under load (hand holded), and it act OK. The accident was similar to this: http://discuss.ardupilot.org/t/pixhawk-crash-in-mid-air-after-flying-stably/8003 PS.2 almost forget to say specs: Its S500 Frame
APM 2.6 (V3.2.1 latest available)
Chinsee Power Module
Clone radios to telemetry
Sanwa SD10G + 1011FS RX
All failsafes are set and working (tested)
LOG FILE : https://www.dropbox.com/s/k1qpn8j9g7u4bbj/2016-03-17%2009-40-30.bin?dl=0
Sorry for my english, but i think you gonna understand the point.
Thanks Filip
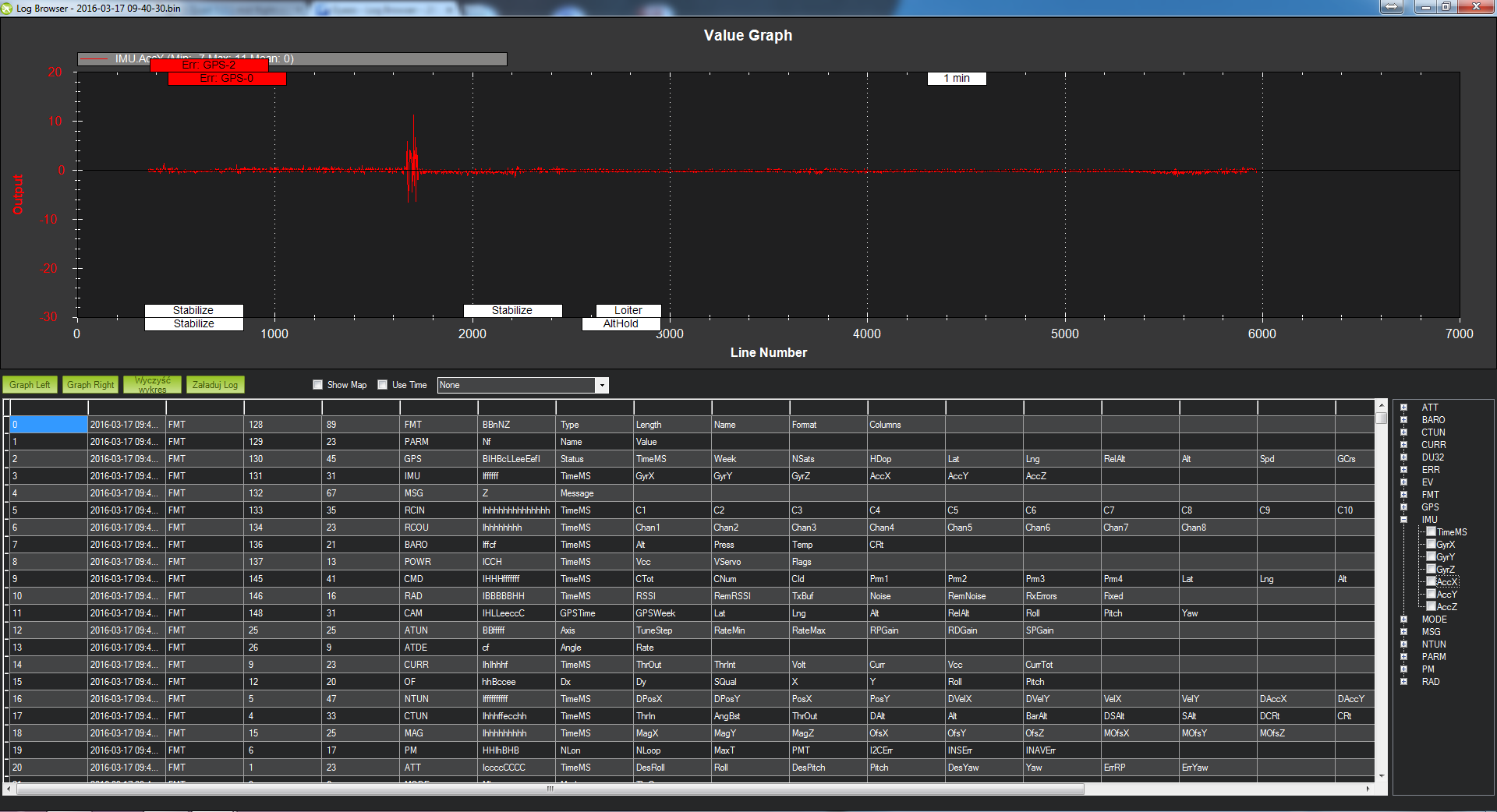
First thing I see is this:
log
Size (kb) 432.22265625
No of lines 5987
Duration 0:01:18
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Balance/Twist = NA -
Test: Brownout = FAIL - Truncated Log? Ends while armed at altitude 17.02m
Test: Compass = GOOD - No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: GPS_GLITCH
Test: GPS = FAIL - GPS glitch errors found (1)
Min satellites: 4, Max HDop: 5.09
Test: IMU Mismatch = NA -
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = FAIL - VCC below minimum of 4.6v (4.597v)
Also, you should probably enable a lot more logging than you have. No IMU logging, no compass logging is going to be difficult to diagnose anything.
Also, looking at your power, you’re averaging pretty close to the low limit on the ability of the FC (your mean VCC is about 4.75v - minimum is 4.6 before the FC reboots). Sounds like this Chinese PM could be the culprit. It’s always best to have FC power around 5v (I keep mine around 5.2 and have a backup in case something happens).
The glitches could be due to low power.
Ya, ive changed my power supply yesterday.
I have around 4.8 - 5.1V, but unfortunately today during AutoTune it felt down.
APM was logging all before and all after crash so no brownout this time.
About IMU log bitmask, it does log. Its set to log it. Proof: https://i.gyazo.com/0906a00758576d85b2bf581c577947bb.png
Compass logs are set too in last few flights
I think today crash was caused by ESC, but im not sure, i graphed Yaw Roll and Pitch + Des Yaw, Des Roll, Des Pitch and the graph in crash moment is way different than it should be like.
Please take a look for baro graph too (theres minus,negative values)
If someone could look at log i would appericate it.
LOG FILE https://www.dropbox.com/s/cke4g9qdpz4b0n4/2016-03-30%2017-13-46.bin?dl=0
Thanks, Filip
{kind=link}
examples of Pitch and Roll durring accident
bump,
anyone can give me any tip please ?
It’s difficult to analyze with some of the missing parameters. Your vibrations look mostly ok, but I don’t see RCIN or RCOUT being logged; that would help with diagnosing issues with the drive system (motors and/or escs). Make sure the RCOUT and RCIN flags for logging is checked in MP, then write to the FC when you’ve completed that.
i was looking for these logs too.
I didnt know i can turn them on, Thanks.
Ill do it and ill perform next flight maybe tmorrow.
Ill try AT again, but this time with default pids (prev try was on pids from last AT).
Can someone look into this log?
Was faster and harder flight, and on end of it the copter flipped