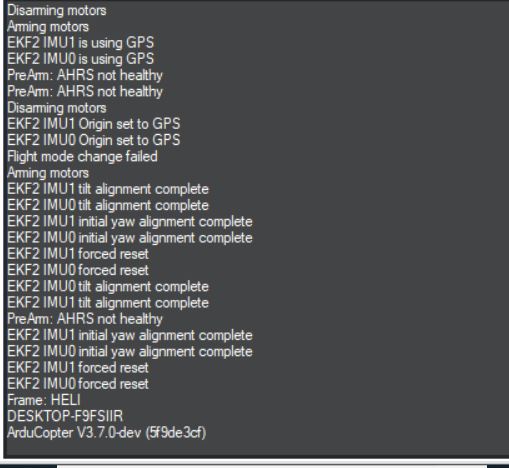
hello, I am new to ardupilot and using it research where I need to hold a helicopter at an altitude constant while I give inputs, I have connected x plane 10 and mission planner but once I arm the helicopter it arms successfully for a couple of seconds and then im
mediately disarms.
also when i change fight mode it just gives me an error saying unable to change flight mode.
can someone help me with this problem?
Thanks in advance.
