I just connected 4 motors to a Holybro PM07 and used Pixhawk-4 with Ardupilot and 4 motors and ESCs. After a lot of work on the ESCs, Tekko32 by Holybro, I finaly got to see the ESCs in BLHeli32 software. However, it is skipping motor#1 and starts at Motor#2,3,4,5. Can’t even run Motor#5 in BLHeli32, but Motors #2,3,4 respond OK.
Information
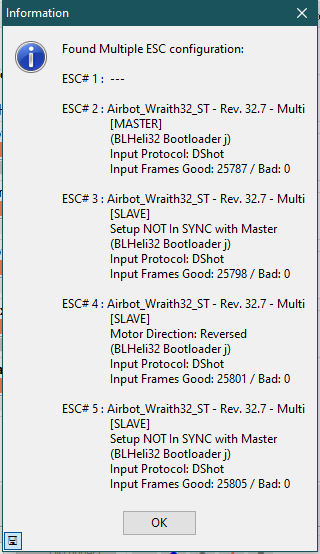
Found Multiple ESC configuration:
ESC# 1 : —
ESC# 2 : Airbot_Wraith32_ST - Rev. 32.7 - Multi
[MASTER]
(BLHeli32 Bootloader j)
Input Protocol: DShot
Input Frames Good: 25787 / Bad: 0
ESC# 3 : Airbot_Wraith32_ST - Rev. 32.7 - Multi
[SLAVE]
Setup NOT In SYNC with Master
(BLHeli32 Bootloader j)
Input Protocol: DShot
Input Frames Good: 25798 / Bad: 0
ESC# 4 : Airbot_Wraith32_ST - Rev. 32.7 - Multi
[SLAVE]
Motor Direction: Reversed
(BLHeli32 Bootloader j)
Input Protocol: DShot
Input Frames Good: 25801 / Bad: 0