I am using a very big frame and it’s mostly like X frame but the dimension is not Square. It’s rectangle shape frame wider in front. It’s first time for building that kind of big frame quadcopter. What kind of frame type should I use and how do I need to config that rectangle shape for motor positions?
It won’t make any difference. Use X-frame. If the motors are already set up to spin in the H-frame direction then use that.
So, I only need to choose X frame and no need any parameters to config that rectangle shape for motor positions?
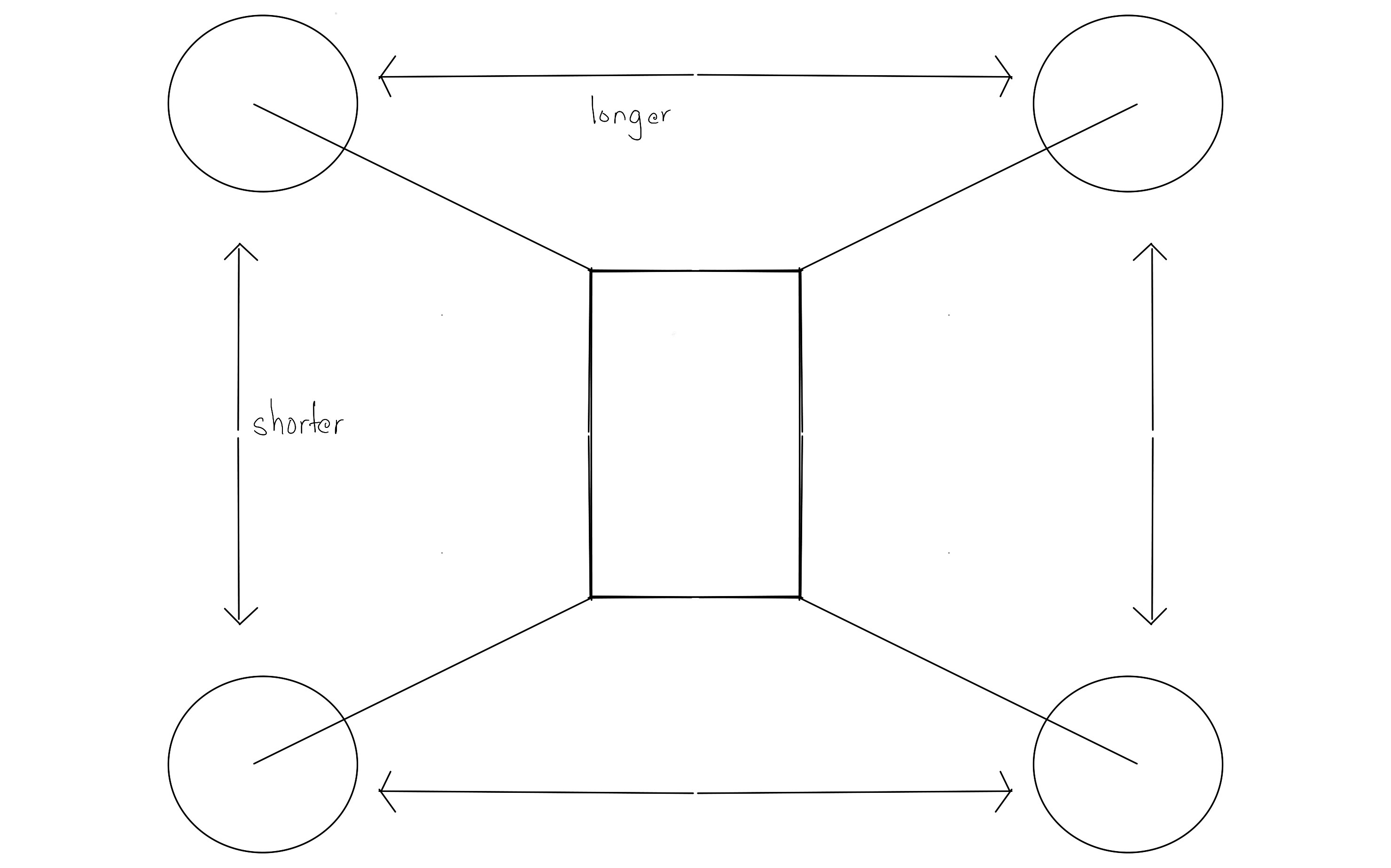
No , you can choose x frame (I would) … It is not a true x frame where outline would be square but in the end the only thing what will be different after tuning is your PID roll and PID pitch ( because your axis are not equal) .
Main difference with H frame config is the motors spin in reverse directions .
Some argue it is slightly better for underpowered vehicles but let us assume that is just bad practice.
Some use reverse motors so less dirt smashes into fpv cameralens or because front motors push outwards obstacles are pushed away. This applies for fpv racers or small freestylers.
Most of us use X frame.
…
X-frame
Thanks, for your advice, I need PID tuning for this frame?
Thanks for your answer.
You need tuning for every craft.
I never tried it before, is it safe for that kind of big copter? 100kg
Not sure of your question. All multirotors running Arducopter have to be configured and tuned whether it’s a sub 250g 3" or as large as you can imagine. What’s the use case for this craft?
1 Like
Like for delivery drone
OK. As I said whether it’s a Tiny Whoop or a large commercial craft a comprehensive tuning process is required. If you are new to Ardupilot and/or multirotor builds you should start with a small craft.
1 Like
I’ll echo this 100%. If you have the budget to build such a large copter, spend a little on one that has 7-10 inch props and learn the ropes with it. That’ll be big enough to learn some things that a tiny one may not show you, but it won’t kill you.
1 Like
Thanks for your advice, I will try it
Here’s one that is nearly ready to fly, and you can use the same autopilot and peripherals as you intend to use when you scale.
It is also documented in our wiki:
https://ardupilot.org/copter/docs/reference-frames-hexsoon-edu450.html
1 Like
IIRC it is intended to improve yaw response in more flexible frames in H layout by introducing positive coupling between yaw command and frame twist.
1 Like
yes But our country is very weak about ardupilot, so we didn’t notice it. And everyone is using it without doing it. I’ve been using it for almost 2 years, and I’ve used it from 500g drones to 15kg drones without PID tuning. I used it from 500g to 15kg without PID tuning, but now I’m worried about using a 100kg drone with a rectangle shape quad frame.