I was able to make working a Drotek NEO-MP8 RTK system with Pixhawk and Mission Planner
I upgraded a month ago the NEO-MP8 firmware with Ublox latest version .
To make it work I had to disable the Mission Planner feature of autoconfig the GPS .
Now after some weeks i started to use it again and I notice a strange behavior of the NEO-MP8 system with Mission Planner
- If I do not let Mission Planner to configure the NEO-MP8 (Autoconfig =0)
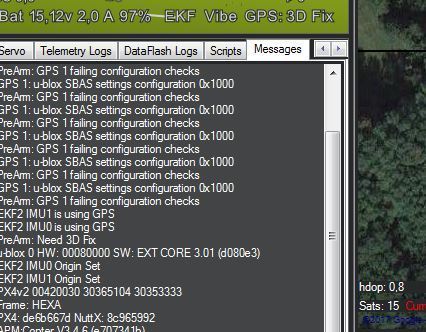
- I obtain a very high Hdop , from 2 to 1,3 and 13 - 14 sats
- When I inject the RTK datas with MP the led on the rover starts to blink red but never becomes steady so I never reach the RTK fix even if the position of the drone at ground become more and more precise, guess I obtain only a floating fix.
- In Mission Planner 3D Fix label is replaced by DGPS
- If I let Mission Planner configure the NEO-MP8
- The Hdop drops to 0,7 - 0,9 - 16 sats
- When I inject the RTK datas with MP the rover led remains always blue, means no RTK datas
- Mission Planner 3D Fix label remains the same.
- Mission Planner reports an error trying to configure GPS 1 but there is only one GPS.
I have updated to latest version of Mission Planner but without solving the problem.
I do not know if the high Hdop value when MP do not configure the GPS is somehow related to the missing RTK fix .
I’m using Windows 7 , it might be a Ublox driver problem ?