Hello. I’ve got an issue with my ardupilot (Mateksys H743-slim)
My throttle and steering are on the same channel (1) and im unable to change it to the correct channels (1 and 3)
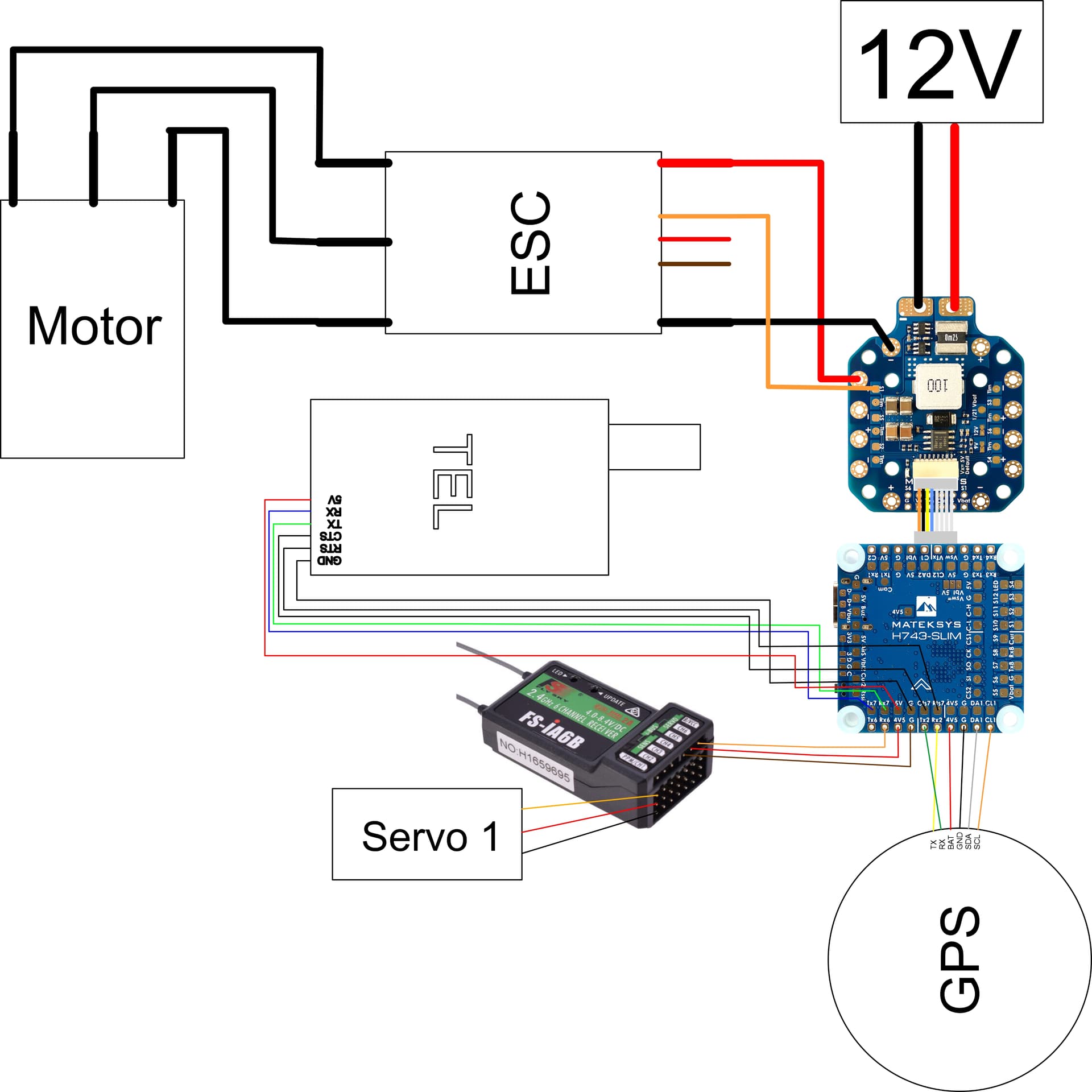
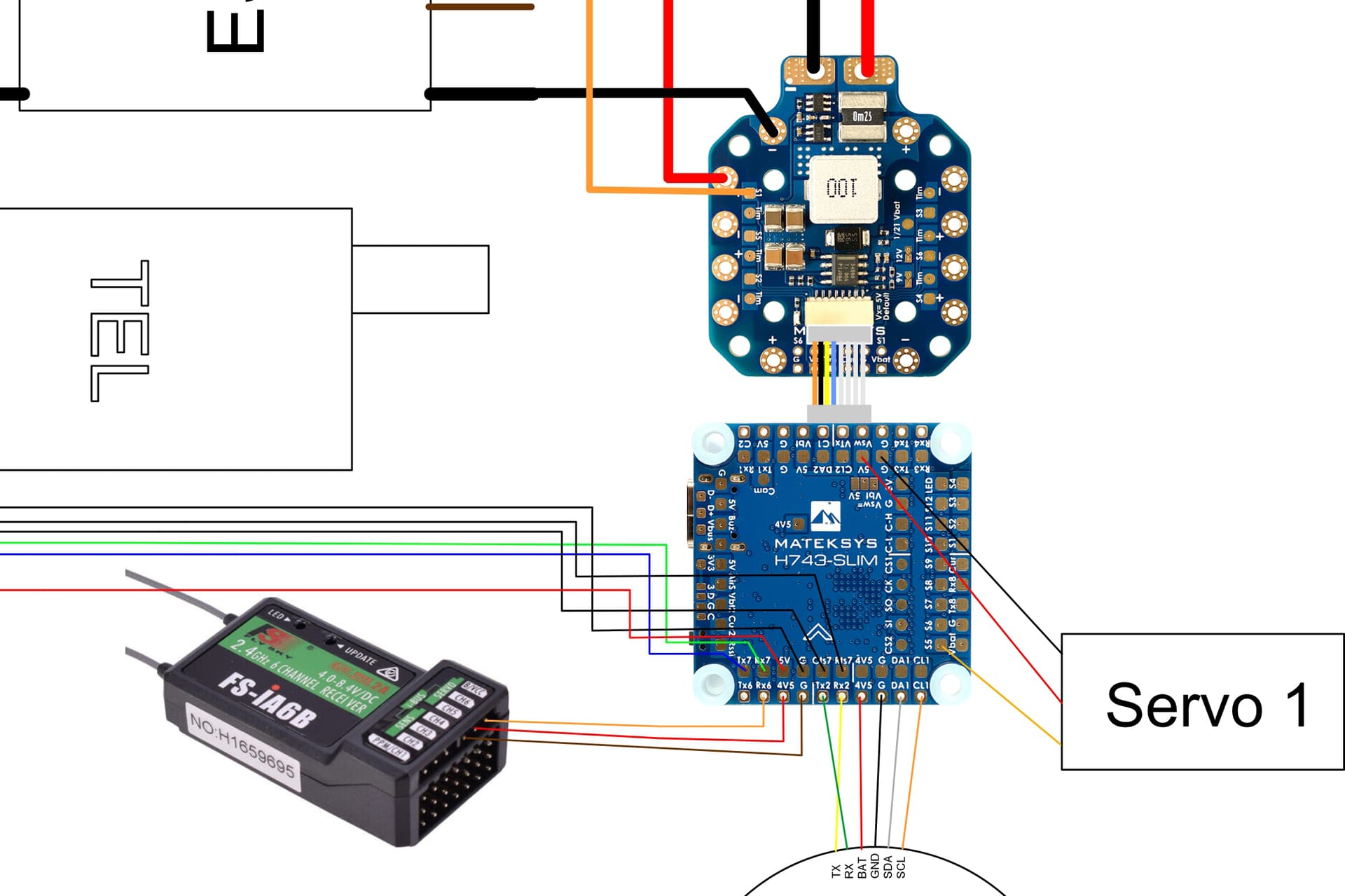
I connected the receiver Flysky Fs-ia6b Ibus servo to my f743-slims RX6.
In mission planner, the correct channels is showing inputs 1 for steering and 3 for throttle but somehow, the motor not turning when i push the throttle stick up and down, when i push the stick for channel 1, both the servo for steering and motor spinns, i don’t know what to do, any suggestions?
Edit: I’ve managed to the throttle on the left stick and steering on the right if i remap and switch throttle and steering but the i got the throttle on steering channel and steering on throttle channel.
No problem, check the wiring examples from matek etc, your pwm outputs are s1 to s12 or whatever, the first four are on the power module labelled s1 s2 s3 and s4 and are designed to be for the escs of a quad i guess, you are fine to use one of those for your esc like your diagram, the next ones are s5 s6 s7 etc which are on the fc. Thats where you put your servo pwm wire. You need seevo power and groung too obviously but those pins are on the fc too. Then set the parameter for servo 5 or whatever you connect to as steering and it might work
So far so good, i soldered the servo signal pin to S5 on the FC, the servo works good when using the SERVO5 in ardupilot but when i changed it från Servo1 to 5, the motor (channel 3, Servo3) wont beep and activate, when i change the Servo back to Servo1, the motor beeps and activate, but then im back on square one again and both Servo and motor are on the same channel and when i move the rudder stick right and left, the motor and servo starts. Suggestions?
You can assign any servo pin to any function, they dont have to mirror the rc channel order. If you want 3 to be throttle then connect your esc to s3 on the power module, if you really want s1 to be steering then you need to connect the servo to s1 where the esc is drawn on your diagram. But normally s1 to four are assigned for esc just because of the location of the pins for wiring ease. In the mandatory setup assign the functions you want to the s pins you want,
There are two parts to this, the rc Chanel of the signal coming in which corresponds to the stick deflection on the transmitter, then there is all the ardupilot code in the middle (unless you are in manual where its basically pass through except for mixing required for frame type etc, then theres the servo output assignment which is configurable. The esc will only beep if its connected to a pin which has a function allocated, so far s3 does not
This is the default configuration for Rover. So connect the Steering Servo to S1 and the Motor/Throttle to S3. You could also leave it wired as is and change the servo output functions, which is what @Scott_Nunan was suggesting, but you seem confused by this so just do the former.
Also, be aware that Vsw pin you are powering the servo from is good for 2A in one jumper position (on-board BEC) and Vbat in the other. Consider not powering the servo from the FC BEC. If the Servo can handle Vbat then set the jumper for that.
Ok, so i didn’t changed or resoldered anything, the thing i did was burned the 14-channel firmware on my Flysky FS-i6, instead of the 10-channel version and the stock firmware and now it works
I suddenly notised that i changed the SETUP > Servo output Position 1 Throttle and Position 5 to Steering, of course that’s why it’s working
The Servo is a EMax ES9258 MG, 2,5 Kg, 0.08s, 4.6-6V, i did think it was ok to use the 5V BEC for powering the servo, do the servo draws more than 2A?
How do i power it, the 5V (2A) is the highest rated output i have on the FC, i don’t know any other solution, should i buy some kind of 12 to 5V converter?
Ah OK, then it might be OK to use the FC BEC to power it. At least for Initial setup and see how it goes. But honestly I would still use an external source. On boards meant to power Servo’s like the Matek Wing boards they have BEC’s specifically for that rated for 8amps. That actually would have been a better choice for a Rover/Boat but the Slim you have will do fine.
Ok, i’ll learn along the path…Yes i agree , the wing model would suit my setup better than the Slim.
If i would do it all over again, i wouldn’t buy the Slim, the soldering of the minimal pads are a nightmare too
Well, the motor, servo, telemetry-radio working like it should now, my next step is to figure out the autonomous part,