Hi all,
I would like make a request to add warning about analog servo refresh rate after finding my stupid mistake of using Analog servos.
In the docs, it says digital servos are recommended for better flight stability.So i was just trying to setup a basic old blade 450 3d flybarred heli and i ignored the digital servo suggestion as i only need basic hovering,I went ahead and setup my system and luckily my older analog servos were working okay with default 125hz refresh rate.One of my servo gears felt little sloppy, so i decided to replace one of mine existing analog servo with emax analog servo.As soon i swapped,i found erratic behaviour and within in couple of minutes that servo died.
Then i started searching and found the importance of refresh rate for servos.I then reduced the RC servo rate to 60 hz by changing “RC_SPEED 125” to "RC_SPEED 60"and then my another new emax servo started behaving normally.So if there is little warning about the analog servo refresh rate in the docs,it would be helpful for the newbies.
Now i have few questions:
1)Is it okay to fly for now with 60hz on my analog servos untill i get digital servo?
2)Does tail servo refresh rate also get changed with changing parameter "RC_SPEED " ?
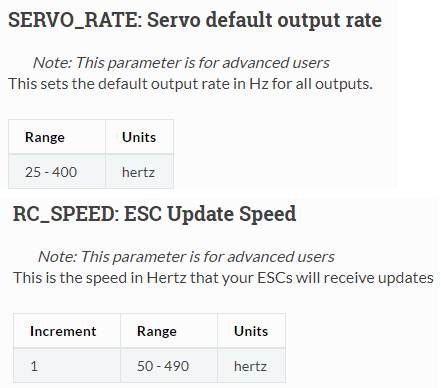
3)what is the difference between RC_SPEED and SERVO_RATE parameter?I couldn’t find RC_SPEED parameter in copter parameter list.
Sorry to hear about that. Analog servos are not recommended for heli’s. I never heard of the 60 hz refresh rate for analog servos. I have always heard that it was 50 hz. Not sure if that will make a difference.
I think the analog servos would be fine but you need to ensure the have enough torque. With a flybarred heli, generally the torque requirements are less. It might be a good idea to look at the heli kit and see what they recommend for servo torque and verify that your analog servos can produce that torque.
Yes, the refresh rate for all heli servos (swashplate and tail) are governed by the RC_SPEED parameter.
RC_SPEED is still there. It governs the higher speed servo outputs like ESCs and digital servos that need to have high refresh rates. The SERVO_RATE is for servos that are used for things that don’t require a high refresh rate like gimbal mounts.
I think info in copter docs about RC_SPEED and SERVO_RATE parameters is little confusing for newbies.It would be nice to have a little note for helicopter application as these docs are mainly pointing towards multi-rotors.
Also could you please add warning about analog servos in the docs saying not to connect analog servos before changing the refresh rate to 50Hz via RC_SPEED parameter.I think it will be useful for newbies.