My goal is to do long range autonomous missions, so I want to find the best cruise speed. This is an RMRC Recruit with a Matek 765 and an Airspeed sensor. Battery was “2200” 3S LiPo. Motor was 2206-2300 with 5x4.5 3-blade prop. Camera is DJI Air Unit.
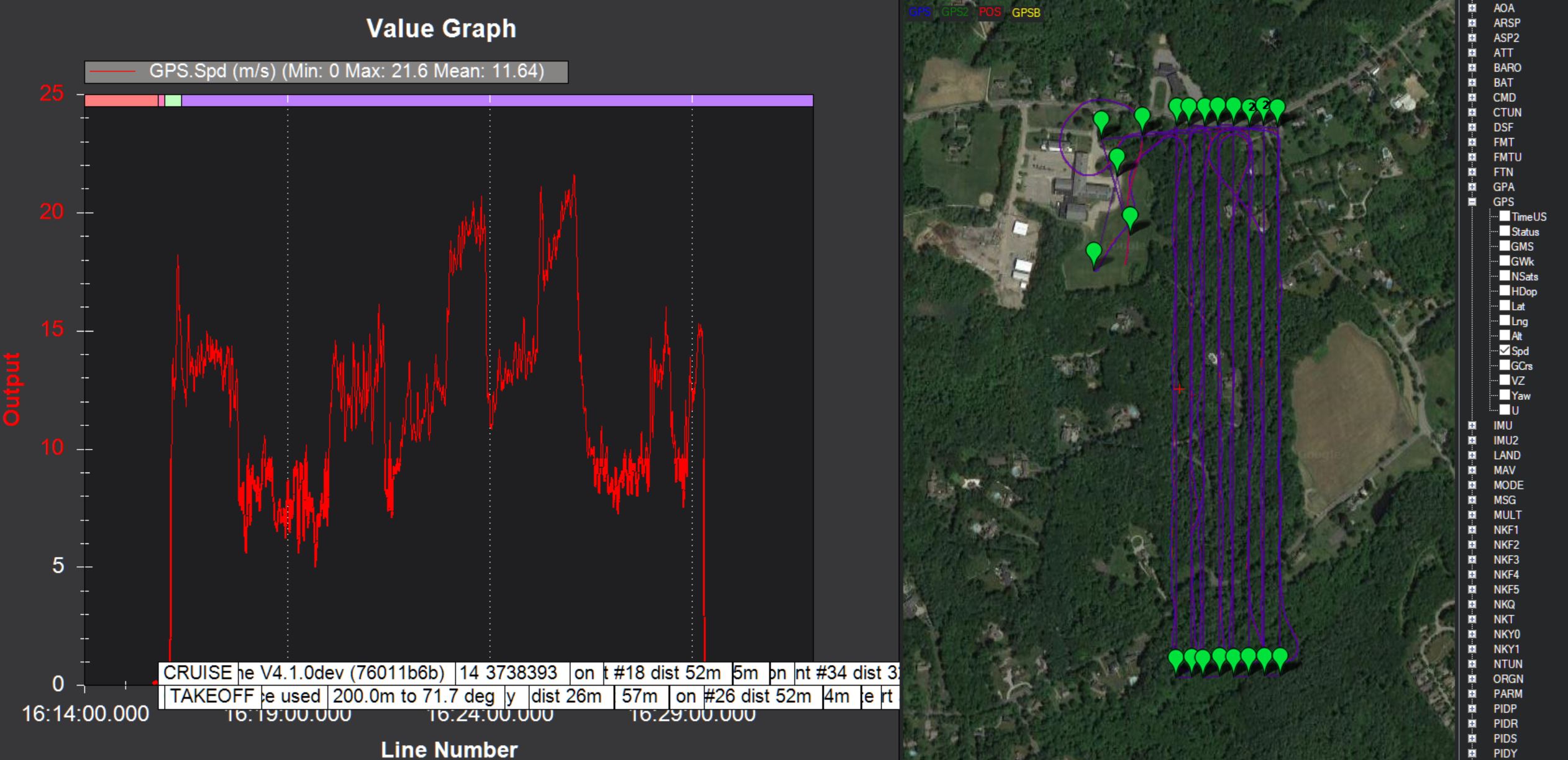
I used QGroundControl and did a test where I went a distance in both North/South directions at 15, 20, 25, and 30 mph. The wind was 7-12 mph and mostly South.
I am not sure how to do this, but would love to know the most distance covered per voltage drop for each of the four speed settings. Then I can use that for my future long range flights.
In calm air (morning before temp rise, to limit air movement influence), fly one minute at each airspeed at constant altitude.
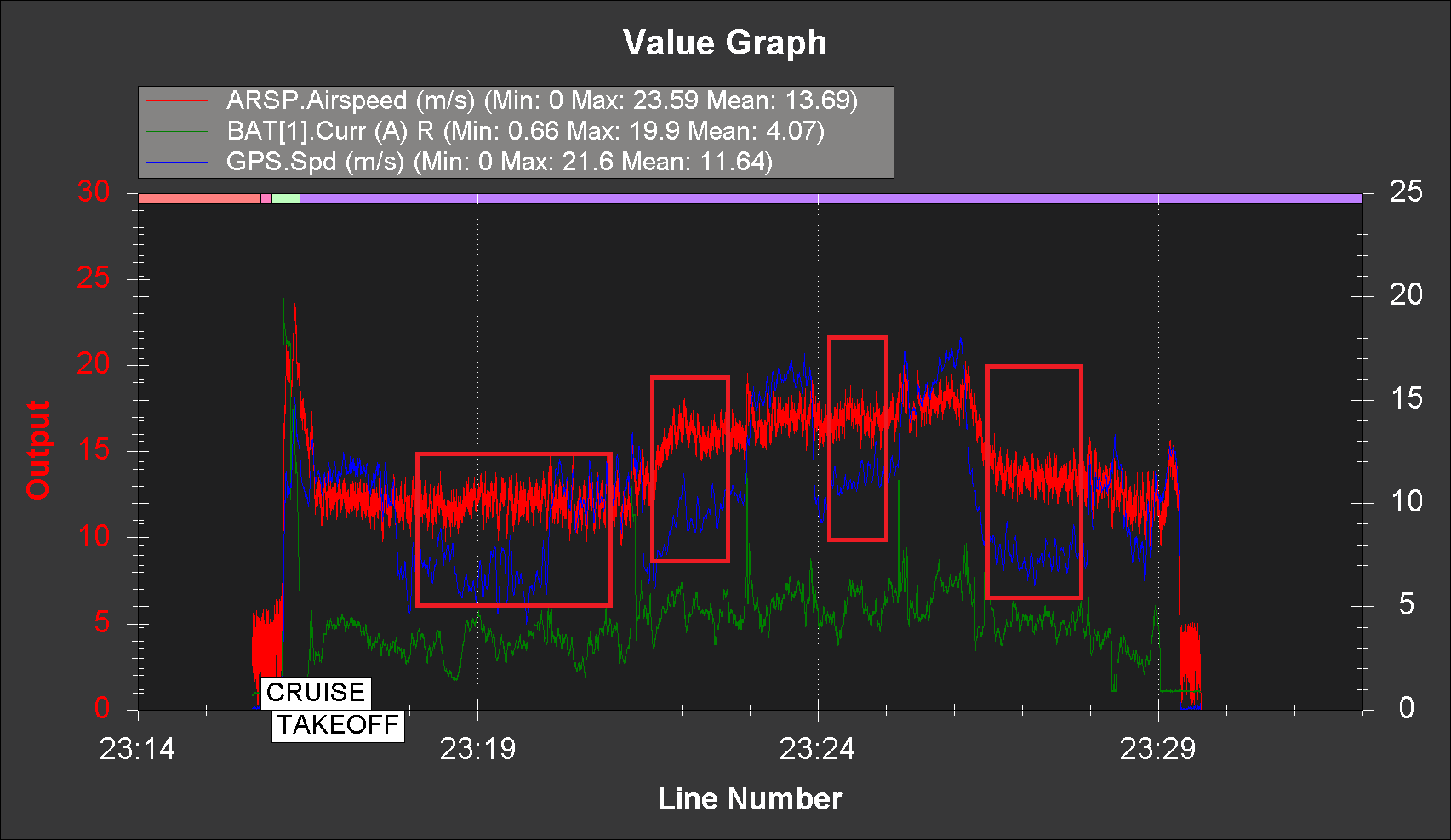
When looking at dataflash log, choose Airspeed and Amp then calculate the ratio. If you have a telemetry link you can also monitor airspeed and Amp on your GCS.
Be aware: when flying with wind, at constant airspeed, if you perform a navigation and land at the take off point, the more wind, the more time to fly the pattern.
A 2.2Ah battery will provide you safelly with 1.65Ah (75%) or 1650mAh
So for maximum endurance obviously you will choose the 12m/s speed, whereas
1,65Ah/3,27Ah = 0,504h = 31.2min = 1816sec => @12m/s = 21,8km roundtrip. Which also seams to be the best option for maximum distance.
Summarizing the calcs:
a. 12m/s @ 3,27A 30min, 21.8km
b. 13.5m/s @ 4,07A 24min, 19.7km
c. 14.8m/s @ 4.85A 20min, 18km
d. 17m/s @ 5,07A 19min, 19.9km
Remarks,
As you may noticed the wind was in your favor for d. and against you in c. The above mentioned values are indicative for airspeed, thus in ground cover can be affected by wind as much as Airspeed-Groundspeed delta (up to 6km in your log!).
2.Furthermore it seems the recruit is a little bit draggy, because it is affected more by headwind
3.your airspeed has a slight offset which needs calibration
4.you may change the prop to more pitch in order to cruise faster with lower rpm (it will be pain to takeoff) I use 4S 3Ah LiIon and T-motor 3blade props for my fwing setup, which gives me 55min @16m/s
5.you may change the battery to a low c lipo or lion with more capacity, Ive seen recruits fly with 3s2p 6000Ah 18650!
Thank you - do you feel that the 12 m/s (26 mph) is about right or did the airspeed sensor error and wind make the results too unreliable?
My airspeed ratio was set at the default for this test. The next day, I did my first Airspeed calibration, and the ratio became 2.4. Not sure how to adjust the results for that, or if I need to repeat.
I did fly this with 3s2P 18650 yesterday. I went 17 miles and used 49% of the power. That is about 20% less efficient than my Parrot Disco with the same battery.
Notice how on my test I had the same ground speed set for a pass in both directions. I thought that might be useful to cancel out the effects of the wind, but maybe not because the flight controller would not go the slow ground speed with a tailwind.
Hi rsilvers,
I didnt saw your reply, so sorry for the late responce.
-12m/s “sounds” right for a foamie, but quite slow for a combat style (back swept) flying wing. Usualy these flying wings tend to have a yaw wiggle at low speed, use fly by wire to find that speed and give something extra. I suspect something like 14m/s would do the job. finding the stall speed is tricky, but usually 1-2m/s bellow the wiggle speed.
You dont need to adjust anything after calibration, just turn off the auto calibration. After some time, ot different environment, you may need to calibrate again (sensor dependent)
-I told you its draggy, 20% seems very high though. Thats because Disco flies with FBW-B and autopilot controls throttle for demanded airspeed, thus its more efficient than FBW-A. Compare them again, with the same airspeed and same pattern.