As posted in the discord, I have a working quad with optical flow (here flow and tfmini) and I’m trying to get it to do auto takeoff and commands from my jetson nano
I’m indoors so no GPS, any thoughts on what to do? I’ve seen scattered forum posts about this but still having trouble finding info and the Takeoff command fails with “no position estimate” - I also tried setting the EFK origin from mission planner to no avail.
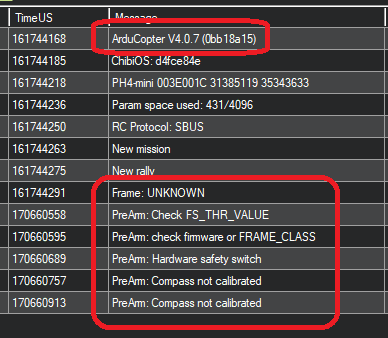
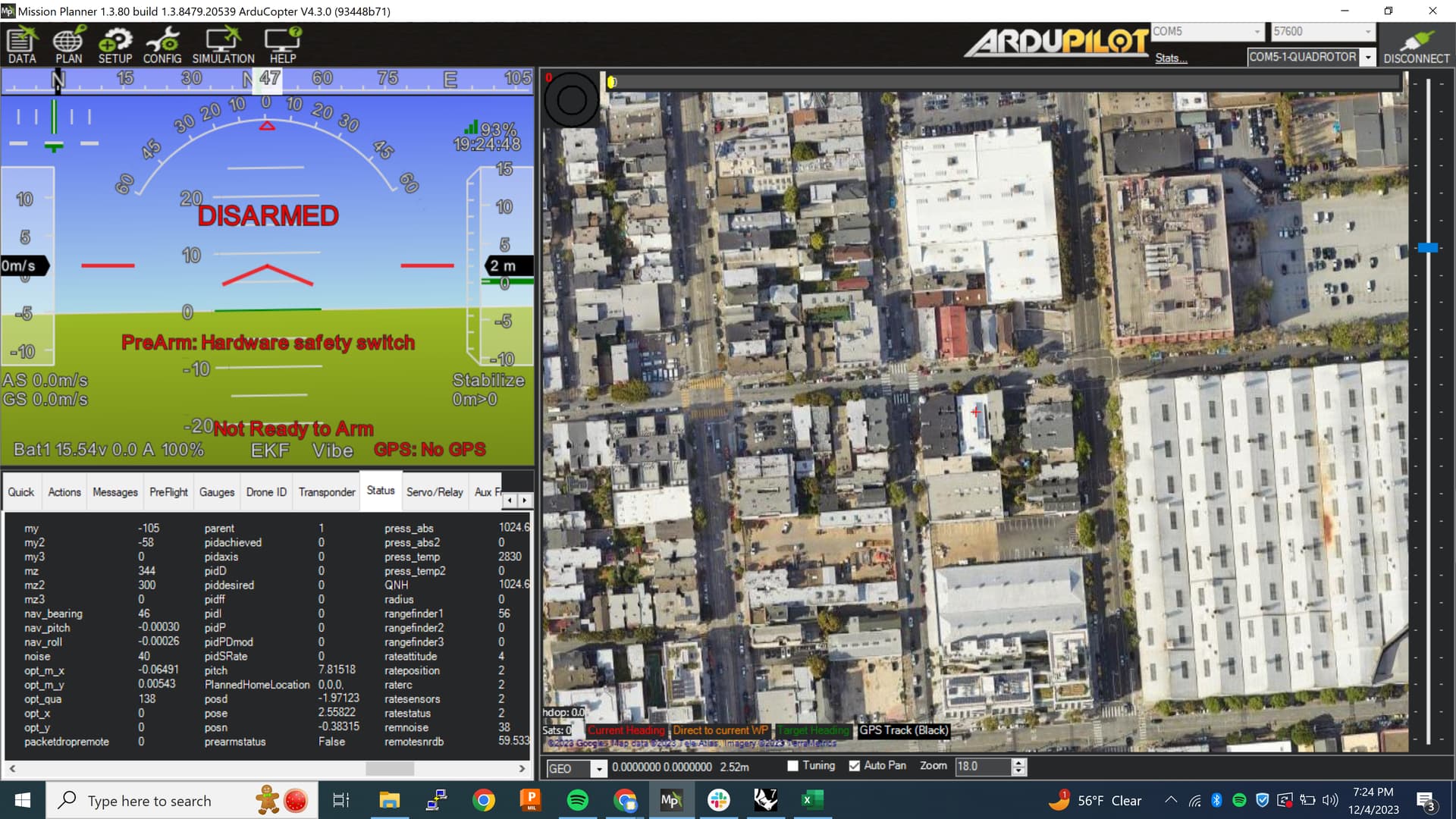
It looks like there are a number of messages displayed on the ground station that show the vehicle hasn’t been setup at all. Also a very old version of AP is installed. The wiki instructions for initial setup are here.
Can you set the ARMING_CHECK back to 1 and also create another log if possible where the vehicle is lifted up and put back down again. Of course you should be able to see the rangefinder distance in MP’s flight data screen’s Quick or Status tab on the bottom left.
Rangefinder is functional - screenshot shows a change when drone is lifted, also updated log attached below. For reference, Loiter and FlowHold modes work fine in the air -
What if I fake a GPS location just for takeoff? Since I’ve already edited the EK3_SRC params to leverage Op Flow and other sensors, will it be able to handle itself after takeoff?
I’d like to use the onboard companion computer to give directional commands.
I have not tried the GPS/Non-GPS transitions because I do not have a functional GPS on-board
Also, I’ve only been able to get MAVProxy functional on Python 2.7 on Jetson Nano - I plan to pipe commands into the interactive MAVProxy shell as a workaround for not getting mavlink, nor the now defunct dronekit working on the Nano