On several of my very recent posts I mentioned my copters sinking when transitioning horizontally in Loiter flight mode.
I got several suggestions to look at the issues addressed by the work of Dr. Paul Riseborough. I reviewed the Git message stream as the software was developed to address this issue - and the ArduPilot Conference video presentation by Dr. Riseborough on this topic. The changelog shows that the software changes were incorporated in stable release 4.1.1.
Going back over my notes, I realized that the sink behavior I’ve observed correlates with my installing 4.1.1 on my 2 OrangeCube equipped copters.
It may be that my copters exhibited some sink before upgrading to 4.1.1 - but it is so much more pronounced now that it prompted me to mention it in my posts.
Several people, notable Philip Rowse, who had followed the development of this, commented that I may need to consider the airflow issues that might be contributing to my sink behavior. I owe Randy an apology for being a bit dismissive of this suggestion - as it wasn’t something I’d observed before - and I coincidentally I was testing new props when I first observed the sink. My apologies, Philip.
In Dr. Riseborough’s presentation, he illustrates several new parameters to address the new barometric interference compensation feature - and tuning procedures.
I’ve been unable to find reference to instructions on using these new tuning parameters - or the tuning procedures required to set them properly.
If others can collaborate my observations of sink behaviors brought about by version 4.1.1 - I recommend remedies be implemented. Some I can think of might include:
-
A parameter that defeats the new feature - and reverts to 4.1.0 behaviors.
-
Implementation of default values of the pertinent parameters that cause the new features to closely follow behaviors in 4.1.0.
-
Full documentation on how to tune and set these parameters - including suggested values for popular vehicle types - as was proposed during Dr. Riseborough’s presentation.
In the mean time - the only option is to revert to 4.1.0 - and as I understand it, rolling back to an earlier version can be problematic in terms of parameters.
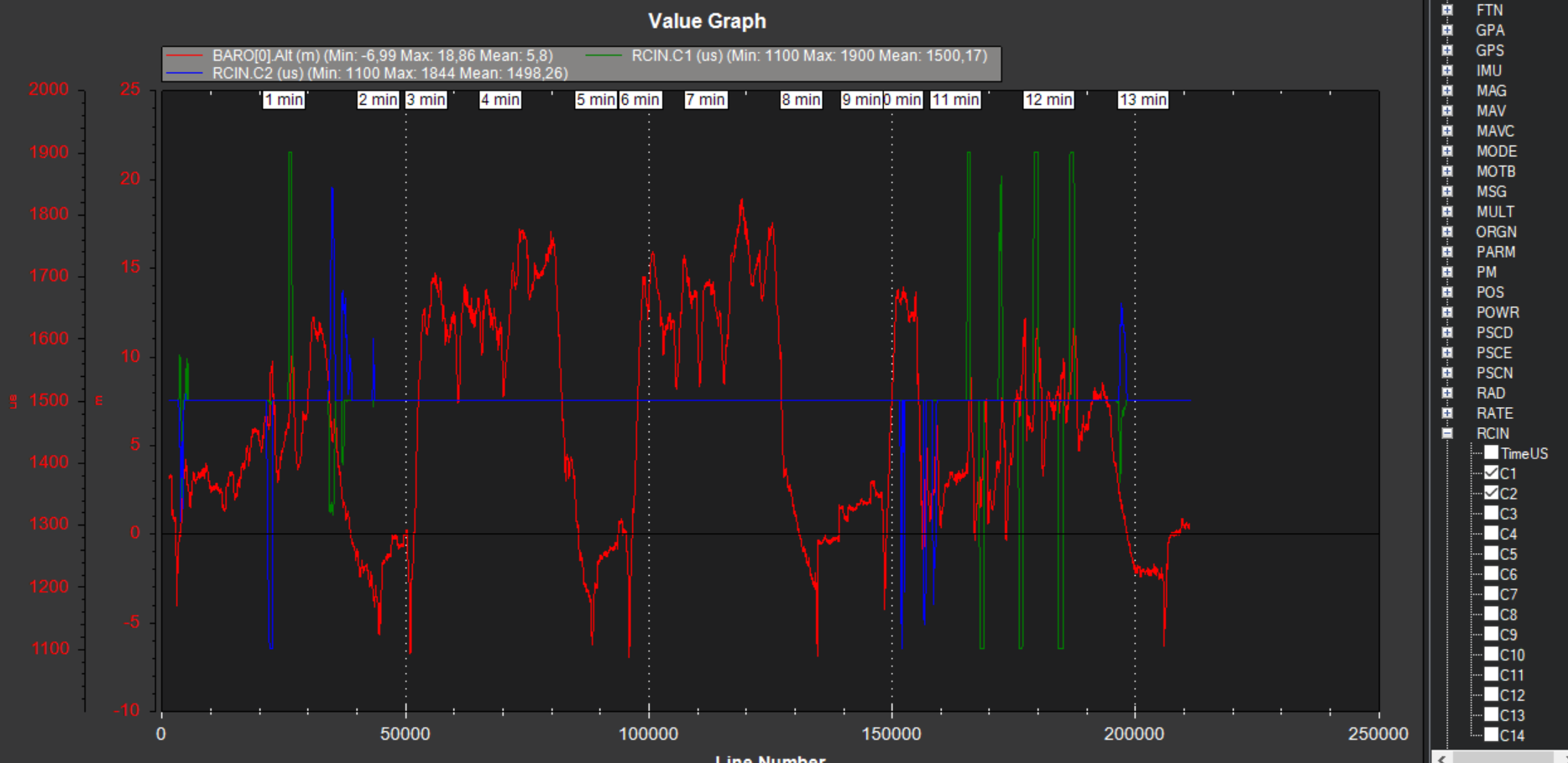
As an practical illustration of the problem, I was doing loiter flights at an altitude of about 3 meters - and flying back toward me from about 100 meters where I was unable to visually observe the full extent of the sink, my copter’s landing gear struck the ground. I was fortunate to have recently installed the Emergency Motor Stop on an aux-switch. I was lucky - no permanent damage.
Thank you for your kind attention, consideration and comments.