Hi,
I have pixhawk4 crazy with barometer.
Regardless plane or copter, it is crazy with barometer first and after several minutes the HUD is also in mad as below.
I also tried Mavlink mirroring from MP to QGC but no difference
< At this try, the hud is calm >

But with PX4 Firm it’s normal as below
< At this try, this HUD is also calm >
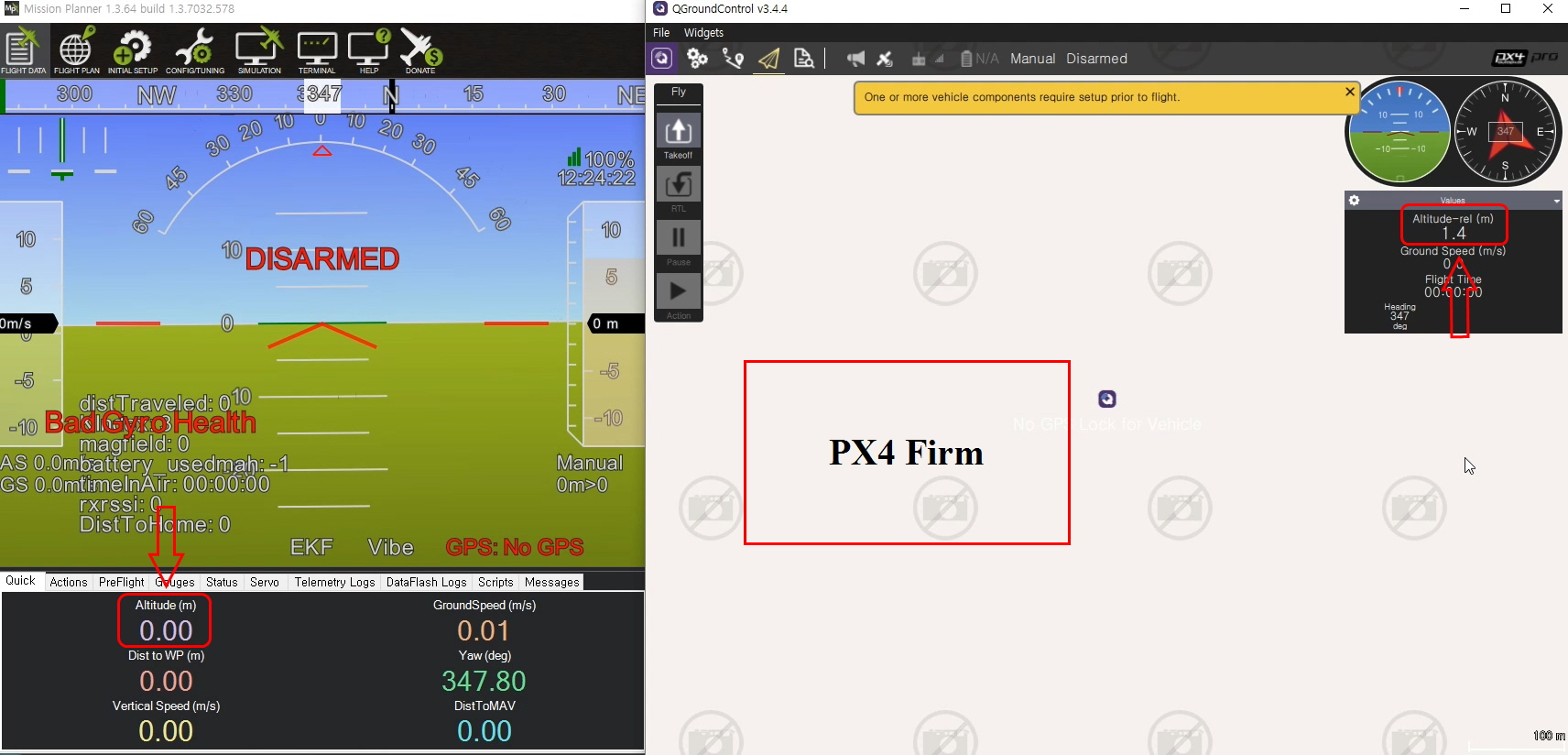
< But alt is diffrecne between MP and QGC. It seems like MP doesn’t get alt data from PX4 >
Any comments would be very appreciated. Thanks in advance.