Because you are not in a steady state flight, so the design point moves all the time.
You need to fly straight and level…
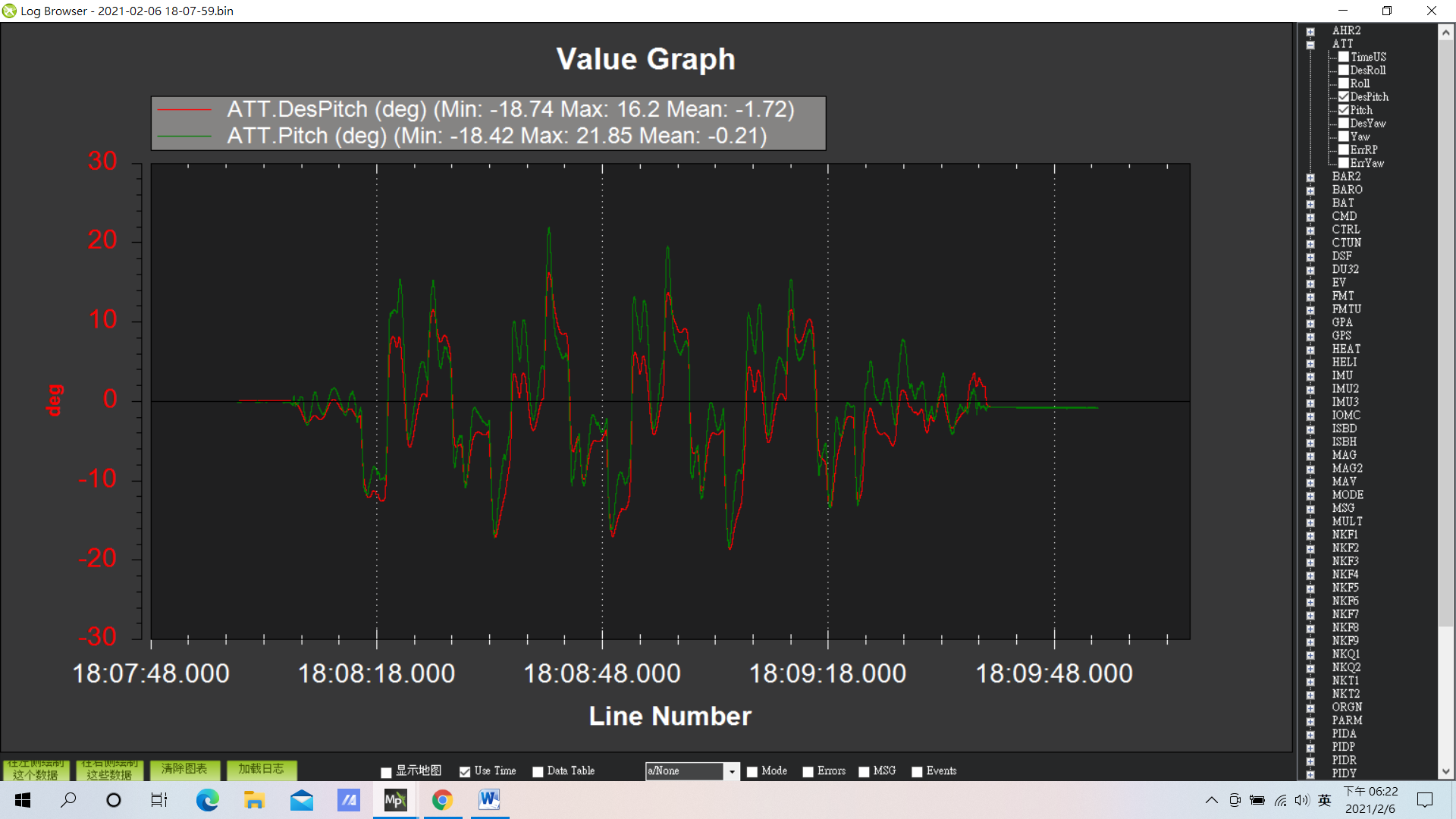
I haven’t looked at your Params but the most common reason when they don’t track or there is a bias between the two is that the pItch and roll ILMI Params are zero. ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI should be set to a value of 0.08.
Okay, I’ll have a test flight tomorrow, thank you
Okay, I’ll have a test flight tomorrow, thank you
So I looked at your params. Why are your ATC_ANG_PIT_P and ATC_ANG_RLL_P lower than 4.5. Did you have a problem that caused you to decrease them. If anything, you want to increase them to at least 6. when you increase this parameter, do so in 0.5 increments. Your ATC_RAT_PIT_I and ATC_RAT_RLL_I are higher than what I would recommend. What size aircraft is this? I typically keep my Roll and pitch I gain around 0.1 to 0.15.
Looking at your log, you are hitting the limit of your I gain (ILMI in hover) and that is what is causing the bias. So increasing the ILMI to 0.08 will help and you don’t want to increase it much more than that because it could cause problems on the ground with the aircraft trying to pitch or roll while it is turning rotors on the ground.
Your harmonic notch is not set correctly. the bandwidth is way too high. this is what I would recommend looking at your current settings and the vibrations in the control signals. It looks like your rotor speed is around 27 hz
INS_HNTCH_FREQ = 27
INS_HNTCH_BW = 10
INS_HNTCH_HMNCS = 11 (this would attenuate the 1st, 2nd and 4th harmonics which assumes you have a 2 bladed rotor)
INS_HNTCH_REF = 1
Leave the other settings alone.