Hi,
I had an indoor flight test that I used QGroundControl and forgot to set EKF origin.
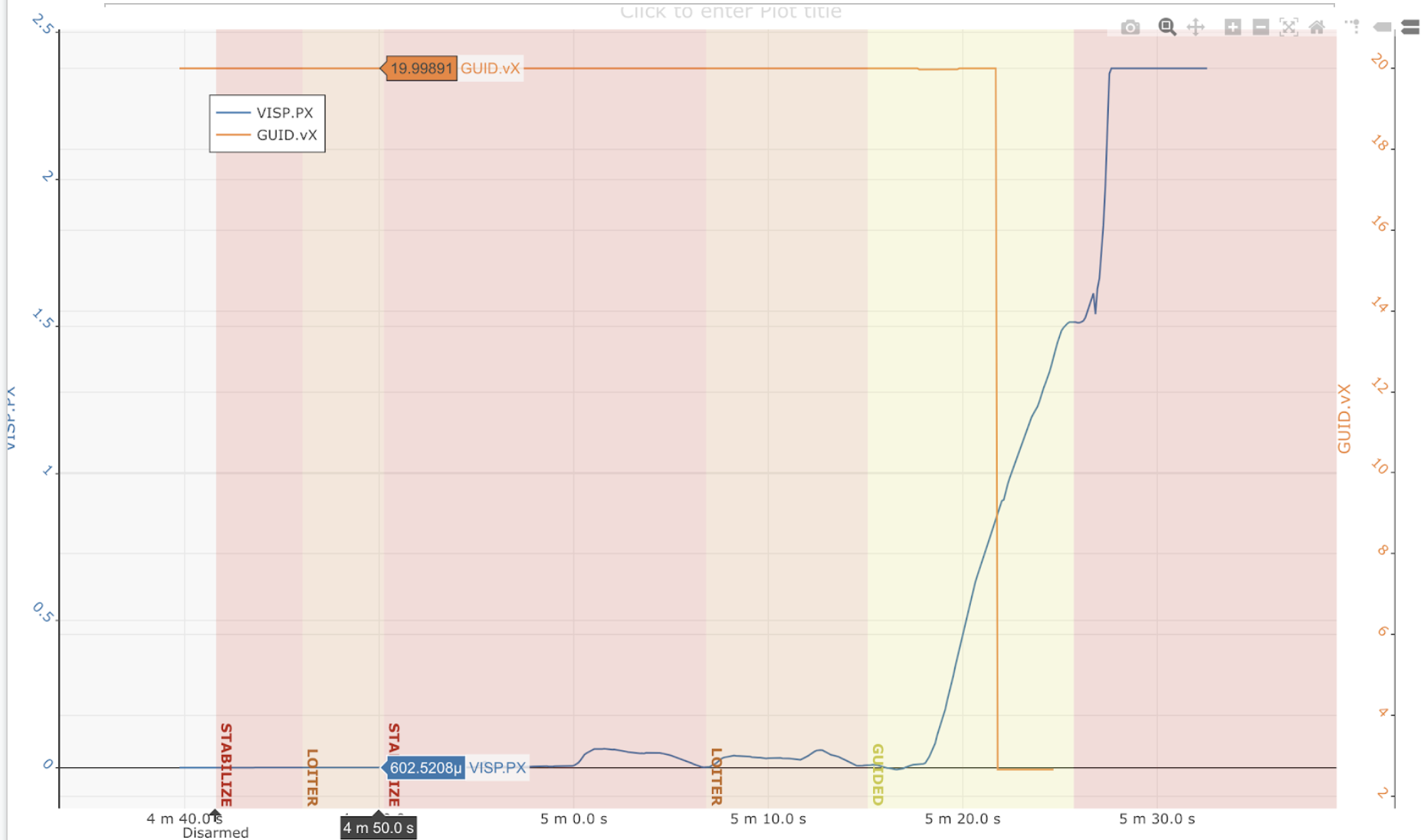
I later found that the drone failed to stop when the GUIDED vx set to 0.
Here’s the flight log https://drive.google.com/drive/folders/1rOJki-0wcavUQ0X4XenK7BRqvu1zk435
Do you have some suggestions?
Thanks,
@cnpcshangbo