data shows: When punch/cut throttle makes drone pitch back?
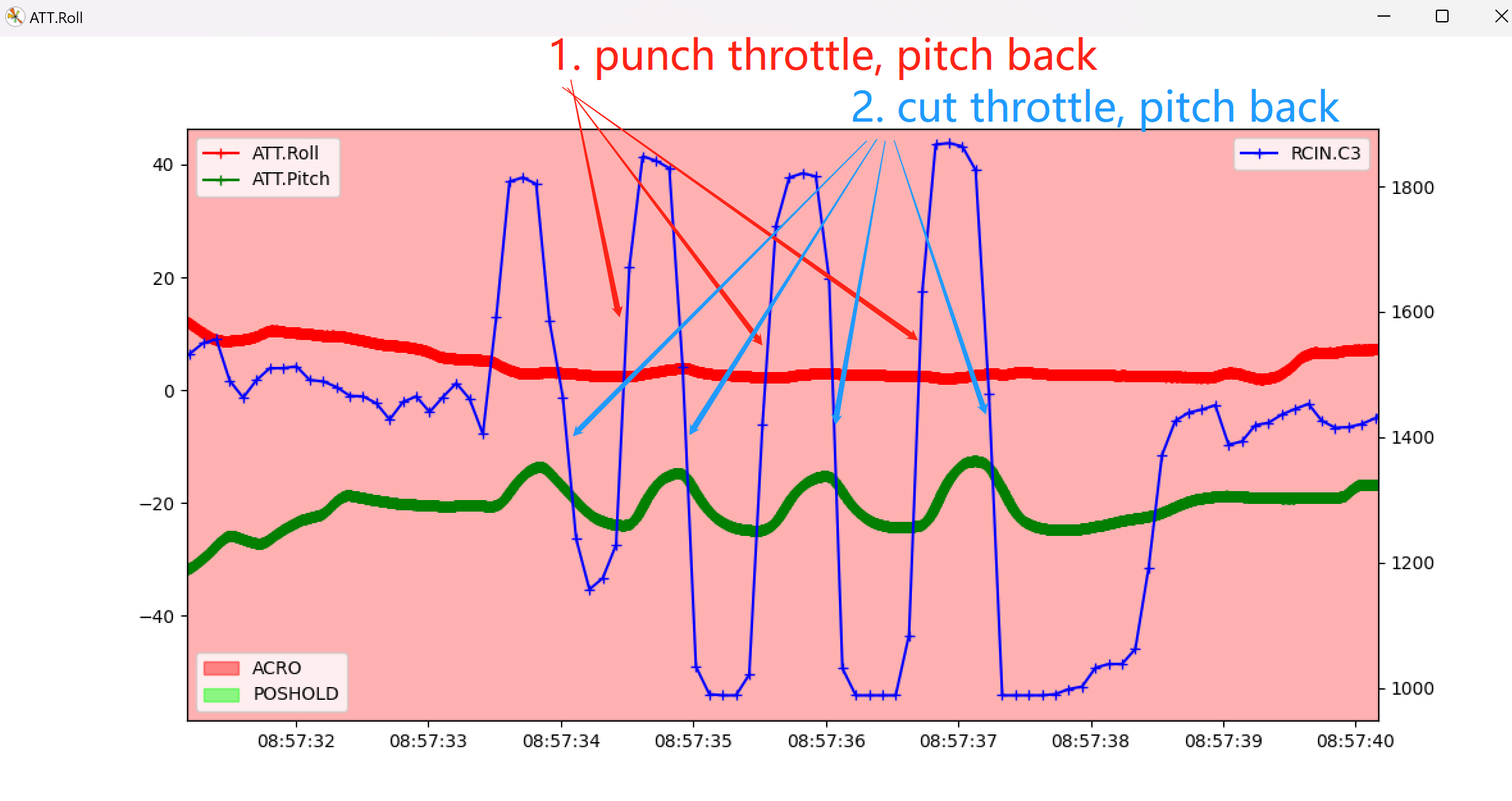
This is a FPV vedio.
*THR_MIN 0.1 /0.14 doesn’t have any improvement.
Any idea about this ?
Discussion in discord: Discord
data shows: When punch/cut throttle makes drone pitch back?
This is a FPV vedio.
*THR_MIN 0.1 /0.14 doesn’t have any improvement.
Any idea about this ?
Discussion in discord: Discord
I would put my bet on motors saturating though it is impossible to actually tell without the .log file.
I have the log, which size is not allowed to upload. Please see in discord( I have put there) Discord
It seems much better with 4.4.0-beta2 antigravity (set ATC_THR_G_BOOST = 0.5)
Maybe the rate and filter can be tuned a little bit. But it’s fine for basic ACRO fly.