We use pixhawk cube orange and ardupilot version 4.0.7. The landing goes well but after touchdown motors do not disarm.
İs there any solution to that?
Here is logs data:
https://drive.google.com/drive/folders/1CfowFZGVVSZi31JCCICf2j5kMUs5QmpE?usp=sharing
Hi,
Regarding your log the plane disarms properly.
Could you give us more details why you believe the plane is NOT disarming?
Because after landing , plane is going on the ground and I disarm plane using ground control station(gcs).
Hi @enes_avcu,
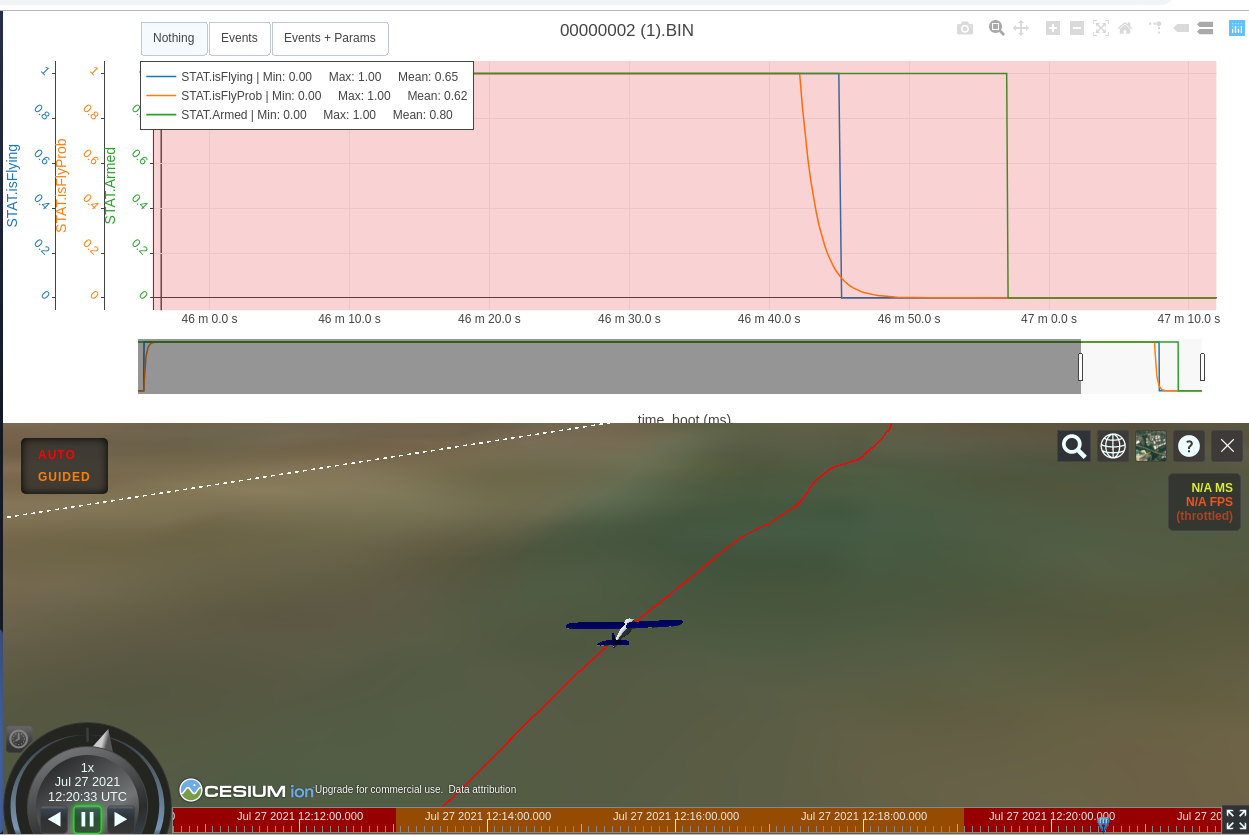
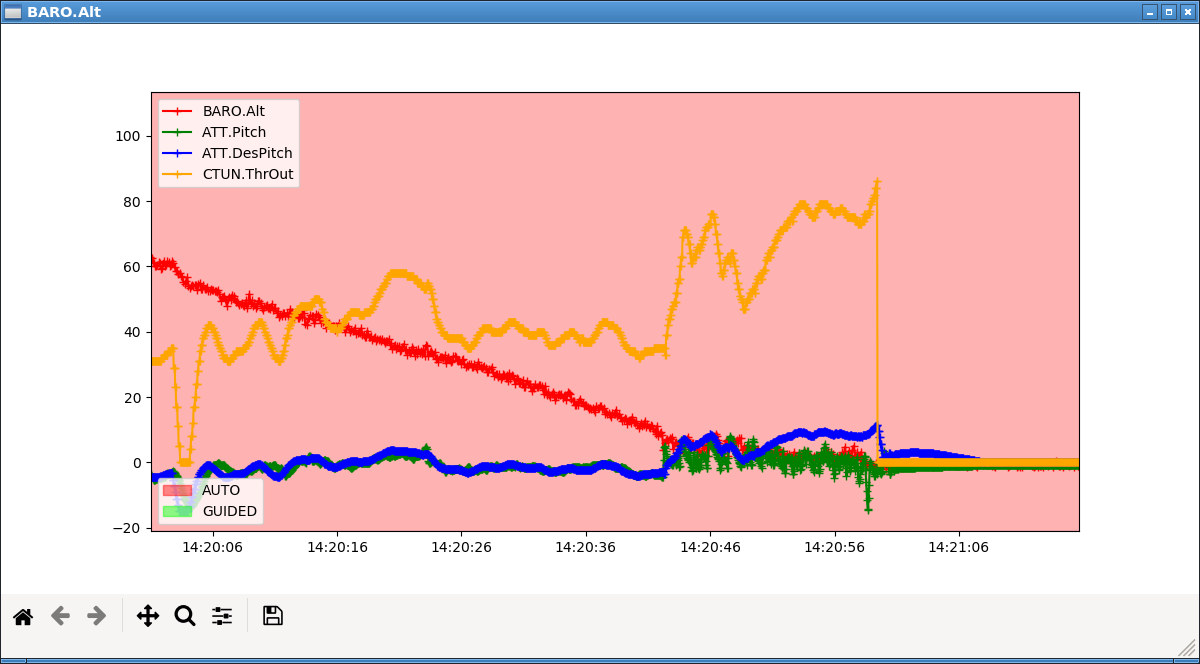
A closer look in the log shows:
You plane does NOT land. It flies into the ground. At approximately 7 meters altitude (regarding the barometer readings) the plane hit the ground.
In the air the plane does not reach the “LAND_FLARE_ALT = 1”. Here normally the motor wil be stopped and the plane begins to flare.
On your flight the height info for the autopilot is off due to bad reading of the barometer and the motor keeps running beyond touch down.
For a successful automatic landing it is really important for the autopilot to know the height above the ground. You rely on the barometer only.
The barometer used as altitude source has some limitations.
The three main reasons for altitude drifts seen by barometer are:
- temperature drift of the sensor
- pressure changes due to weather
- air flow around the fuselage affecting the static pressure readings of the autopilot
The effects mentioned above can be minimized individually. A real solution is the application of a rangefinder to improve the landing performance.
Hope this helps.
1 Like