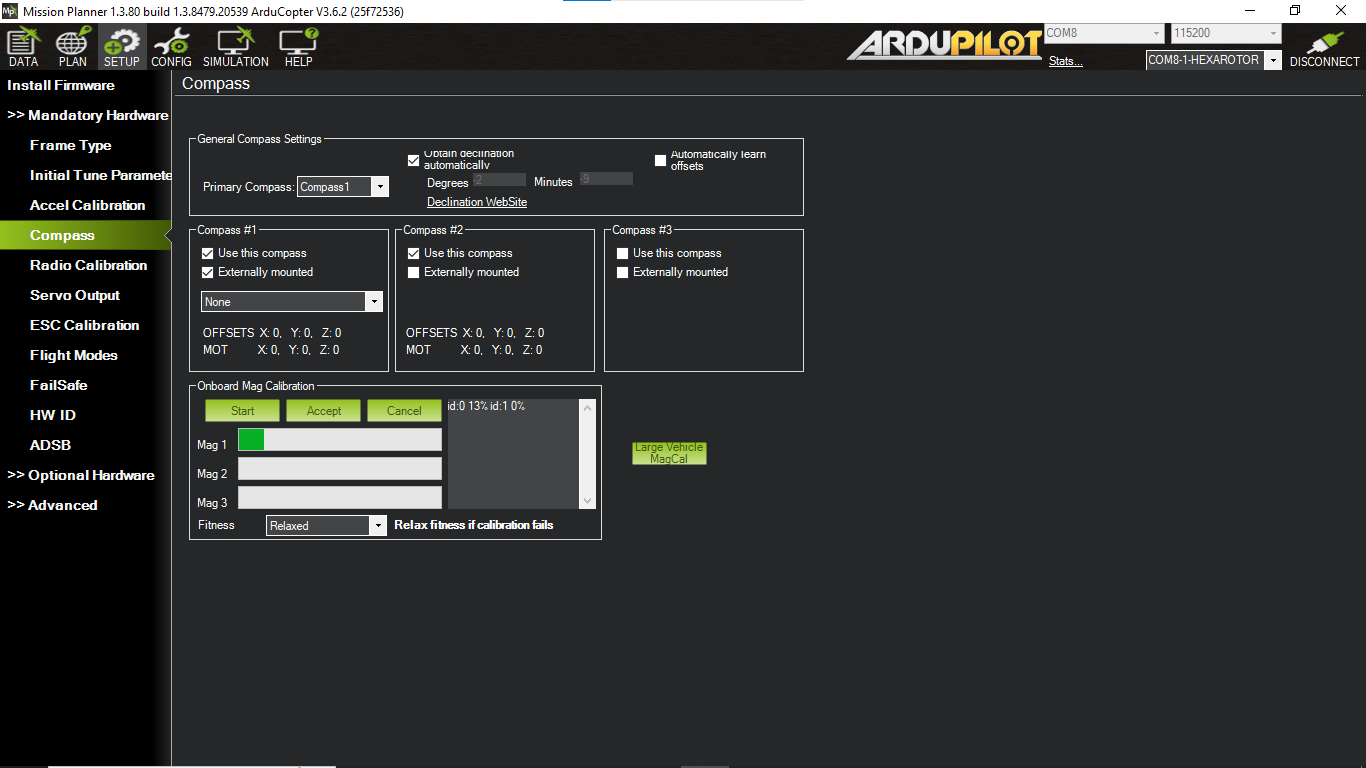
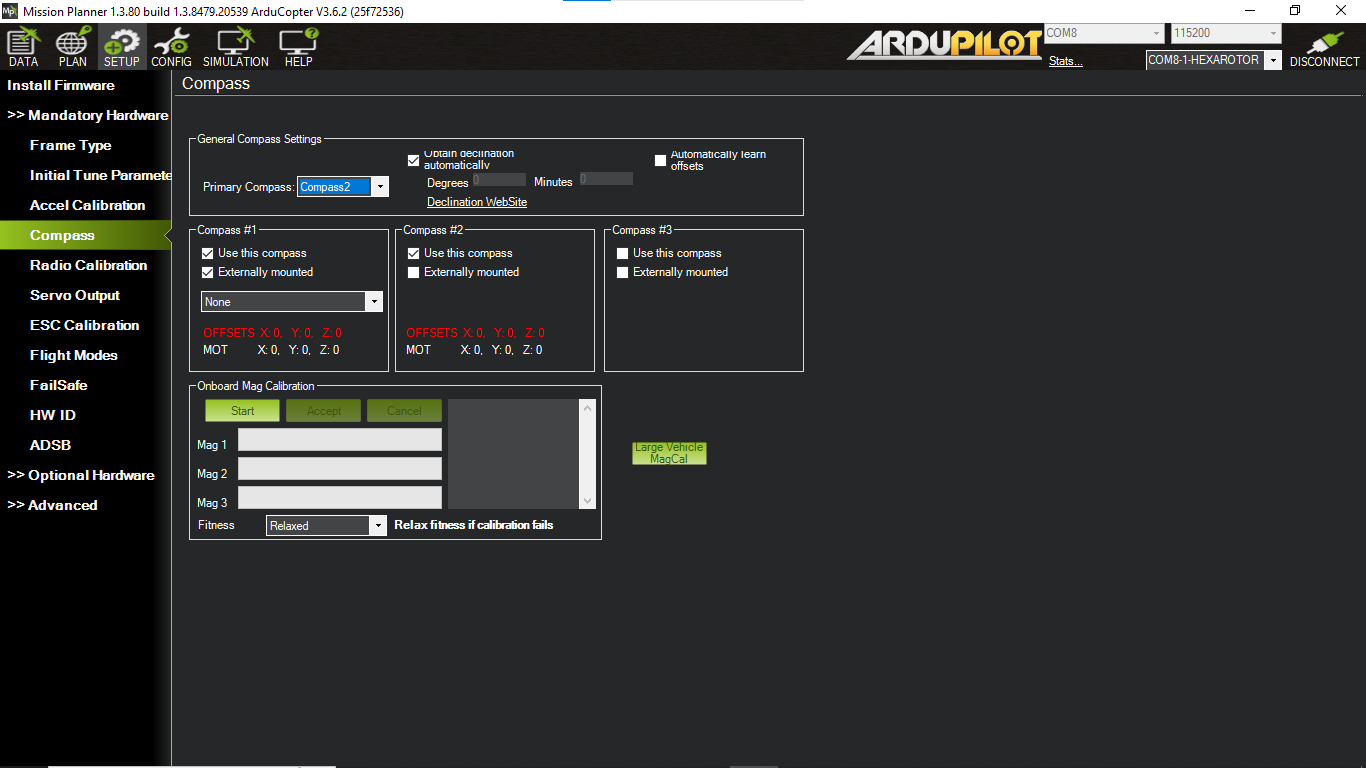
I am having a problem when calibrating mag 1 and 2 only mag one is calibrating. I’m using UBLOX M8N
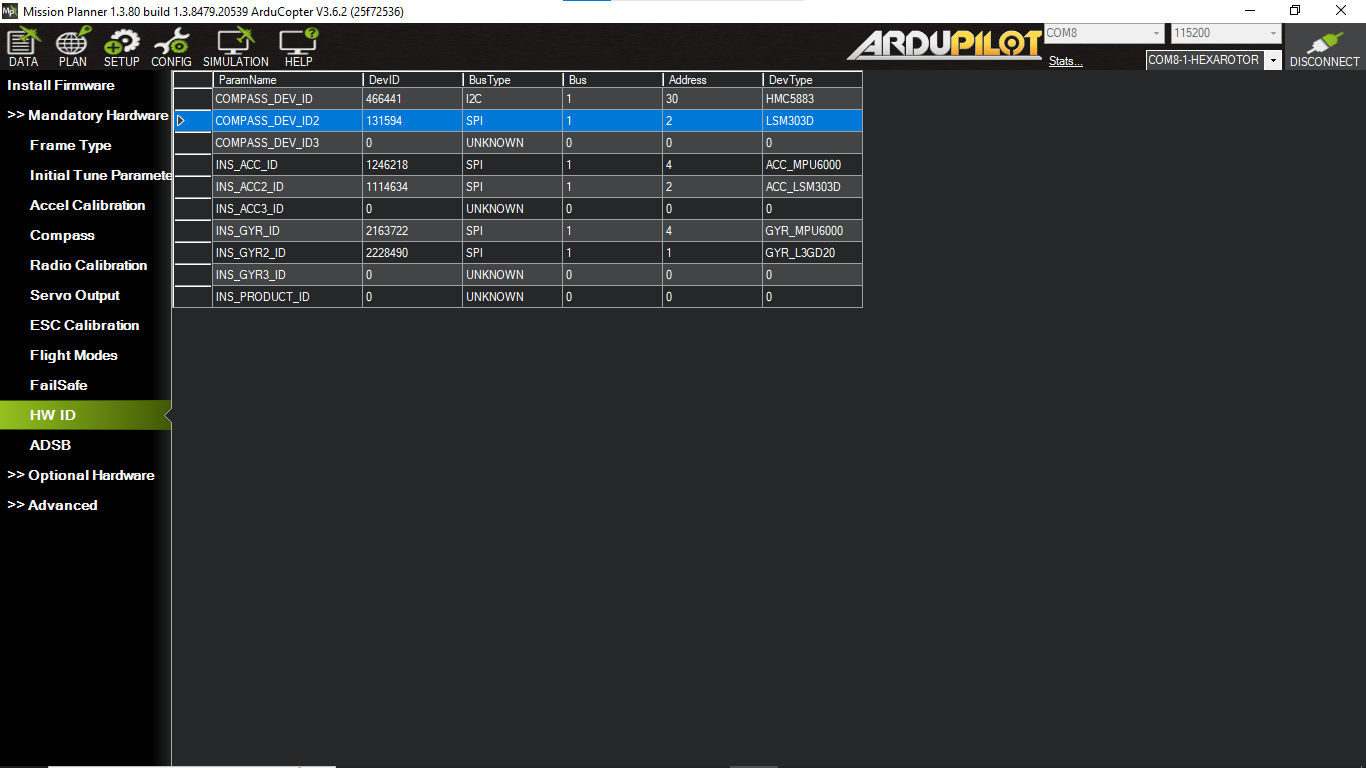
Show a screenshot of the HW ID screen.
Does the GPS unit include a compass? Is it CAN connected?
No I’ve connected all the wires correctly. And also I’m using M8N ublox gps
Still not helping yourself much…
What is the GPS sold as? Like brand or supplier, got a link?
Show a screenshot of the HW ID page.

Why are you using Copter 3.6?! That is almost certainly the reason you are having difficulty. That version has not been supported for years, and it has not been compatible with recent Mission Planner releases for quite some time.
If you are using any autopilot labeled “Pixhawk,” it should be compatible with a more recent release of ArduPilot. Update the firmware before doing anything else.
I used the latest version previously. But in that version this problem came up. So thats why I downgraded firmware
That’s not the solution at all. Use the latest stable. Answer the remainder of @xfacta’s questions.
What do you mean by what is the gps sold as? @xfacta

I’m using this gps unit.
I asked because some come without a compass - yours does have a compass showing and the firmware update may allow it to work. Certainly many other things have been improved in later firmware versions.
OK thanks
but this problem cam at the latest firmware. thats why I downgraded it
I will check it again
OK, what flight controller do you have and what firmware is loaded?
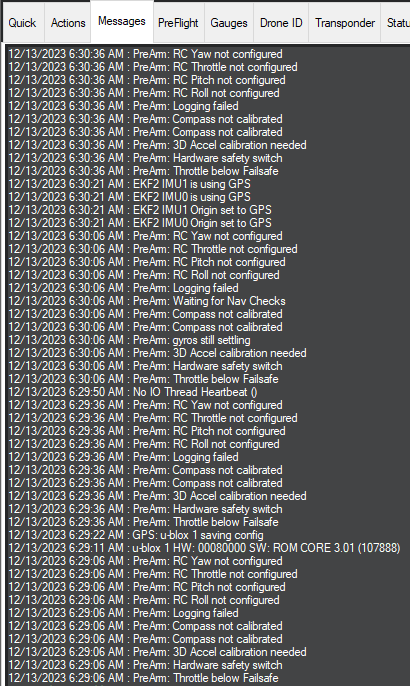
The Messages screen has all that info.
I have a pixhawk 2.4.8 FC. now I have 3.6 version previuosly I had Copter-4.4.2 I’m building a hexa. and also when I take off my drone when I give full throttle the drone will flip
@xfacta do you have any idea on that also
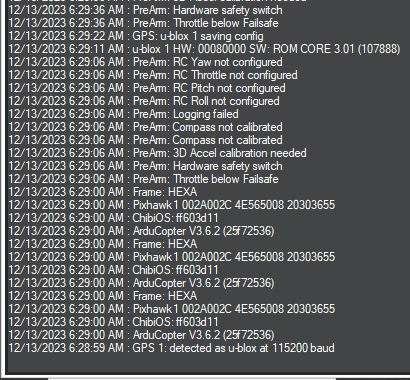
Show the messages screen.
I’m asking for that because it is possible to load a couple of different firmwares on the Pixhawk. Such as FMUv2 or FMUv3. The messages tells you if it’s wrong.
If you reload the latest firmware for FMUv3 then all components should work.
Flip on takeoff is 99.99% of the time incorrect motor order.
@xfacta here
12/13/2023 6:31:06 AM : PreArm: RC Yaw not configured
12/13/2023 6:31:06 AM : PreArm: RC Throttle not configured
12/13/2023 6:31:06 AM : PreArm: RC Pitch not configured
12/13/2023 6:31:06 AM : PreArm: RC Roll not configured
12/13/2023 6:31:06 AM : PreArm: Logging failed
12/13/2023 6:31:06 AM : PreArm: Compass not calibrated
12/13/2023 6:31:06 AM : PreArm: Compass not calibrated
12/13/2023 6:31:06 AM : PreArm: 3D Accel calibration needed
12/13/2023 6:31:06 AM : PreArm: Hardware safety switch
12/13/2023 6:31:06 AM : PreArm: Throttle below Failsafe
12/13/2023 6:30:49 AM : No IO Thread Heartbeat ()
12/13/2023 6:30:36 AM : PreArm: RC Yaw not configured
12/13/2023 6:30:36 AM : PreArm: RC Throttle not configured
12/13/2023 6:30:36 AM : PreArm: RC Pitch not configured
12/13/2023 6:30:36 AM : PreArm: RC Roll not configured
12/13/2023 6:30:36 AM : PreArm: Logging failed
12/13/2023 6:30:36 AM : PreArm: Compass not calibrated
12/13/2023 6:30:36 AM : PreArm: Compass not calibrated
12/13/2023 6:30:36 AM : PreArm: 3D Accel calibration needed
12/13/2023 6:30:36 AM : PreArm: Hardware safety switch
12/13/2023 6:30:36 AM : PreArm: Throttle below Failsafe
12/13/2023 6:30:21 AM : EKF2 IMU1 is using GPS
12/13/2023 6:30:21 AM : EKF2 IMU0 is using GPS
12/13/2023 6:30:21 AM : EKF2 IMU1 Origin set to GPS
12/13/2023 6:30:21 AM : EKF2 IMU0 Origin set to GPS
12/13/2023 6:30:06 AM : PreArm: RC Yaw not configured
12/13/2023 6:30:06 AM : PreArm: RC Throttle not configured
12/13/2023 6:30:06 AM : PreArm: RC Pitch not configured
12/13/2023 6:30:06 AM : PreArm: RC Roll not configured
12/13/2023 6:30:06 AM : PreArm: Logging failed
12/13/2023 6:30:06 AM : PreArm: Waiting for Nav Checks
12/13/2023 6:30:06 AM : PreArm: Compass not calibrated
12/13/2023 6:30:06 AM : PreArm: Compass not calibrated
12/13/2023 6:30:06 AM : PreArm: gyros still settling
12/13/2023 6:30:06 AM : PreArm: 3D Accel calibration needed
12/13/2023 6:30:06 AM : PreArm: Hardware safety switch
12/13/2023 6:30:06 AM : PreArm: Throttle below Failsafe
12/13/2023 6:29:50 AM : No IO Thread Heartbeat ()
12/13/2023 6:29:36 AM : PreArm: RC Yaw not configured
12/13/2023 6:29:36 AM : PreArm: RC Throttle not configured
12/13/2023 6:29:36 AM : PreArm: RC Pitch not configured
12/13/2023 6:29:36 AM : PreArm: RC Roll not configured
12/13/2023 6:29:36 AM : PreArm: Logging failed
12/13/2023 6:29:36 AM : PreArm: Compass not calibrated
12/13/2023 6:29:36 AM : PreArm: Compass not calibrated
12/13/2023 6:29:36 AM : PreArm: 3D Accel calibration needed
12/13/2023 6:29:36 AM : PreArm: Hardware safety switch
12/13/2023 6:29:36 AM : PreArm: Throttle below Failsafe
12/13/2023 6:29:22 AM : GPS: u-blox 1 saving config
12/13/2023 6:29:11 AM : u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
12/13/2023 6:29:06 AM : PreArm: RC Yaw not configured
12/13/2023 6:29:06 AM : PreArm: RC Throttle not configured
12/13/2023 6:29:06 AM : PreArm: RC Pitch not configured
12/13/2023 6:29:06 AM : PreArm: RC Roll not configured
12/13/2023 6:29:06 AM : PreArm: Logging failed
12/13/2023 6:29:06 AM : PreArm: Compass not calibrated
12/13/2023 6:29:06 AM : PreArm: Compass not calibrated
12/13/2023 6:29:06 AM : PreArm: 3D Accel calibration needed
12/13/2023 6:29:06 AM : PreArm: Hardware safety switch
12/13/2023 6:29:06 AM : PreArm: Throttle below Failsafe
12/13/2023 6:29:00 AM : Frame: HEXA
12/13/2023 6:29:00 AM : Pixhawk1 002A002C 4E565008 20303655
12/13/2023 6:29:00 AM : ChibiOS: ff603d11
12/13/2023 6:29:00 AM : ArduCopter V3.6.2 (25f72536)
12/13/2023 6:29:00 AM : Frame: HEXA
12/13/2023 6:29:00 AM : Pixhawk1 002A002C 4E565008 20303655
12/13/2023 6:29:00 AM : ChibiOS: ff603d11
12/13/2023 6:29:00 AM : ArduCopter V3.6.2 (25f72536)
12/13/2023 6:29:00 AM : Frame: HEXA
12/13/2023 6:29:00 AM : Pixhawk1 002A002C 4E565008 20303655
12/13/2023 6:29:00 AM : ChibiOS: ff603d11
12/13/2023 6:29:00 AM : ArduCopter V3.6.2 (25f72536)
12/13/2023 6:28:59 AM : GPS 1: detected as u-blox at 115200 baud
Definitely upgrade to latest stable firmware, and choose FMUv3 as the flight controller
And also my motor order is correct I becouse when it trys to flip left I gave input to right side to balnce it and it got in to sky and flew nicely but it’s panning to left.
OK, then level the frame as a whole unit by packing under the landing gear - dont assume the surface it is sitting on is level (it’s the prop disc that matters, not the landing gear or even flight controller). Then in MissionPlanner Setup → Mandatory → Accel Calibration → press Calibrate Level
In QGC it’s level horizon or something similar.
Also after the compasses are working correctly and calibrated, that might help.
Thanks. ![]()
I’ll do it and let you know whether it worked or not