I’m just curious why ardupilot only supports 2 gps?
Is there any special requirement for more than 2 GPS (1 active, 1 backup)?
I think Peter Barker is working on adding support for at least 1 more. There are some reasons to use 3 including using a median filter (?). Where the best two are used and the 3rd is ignored
I was thinking for redundancy and using magless yaw.
- 2GPS (1 active, 1 backup),
- 3GPS @rmackay9 says Peter Barker is working on a media filter for smoothing the GPS data ( 2 for media filter, 1 backup), which makes sense.
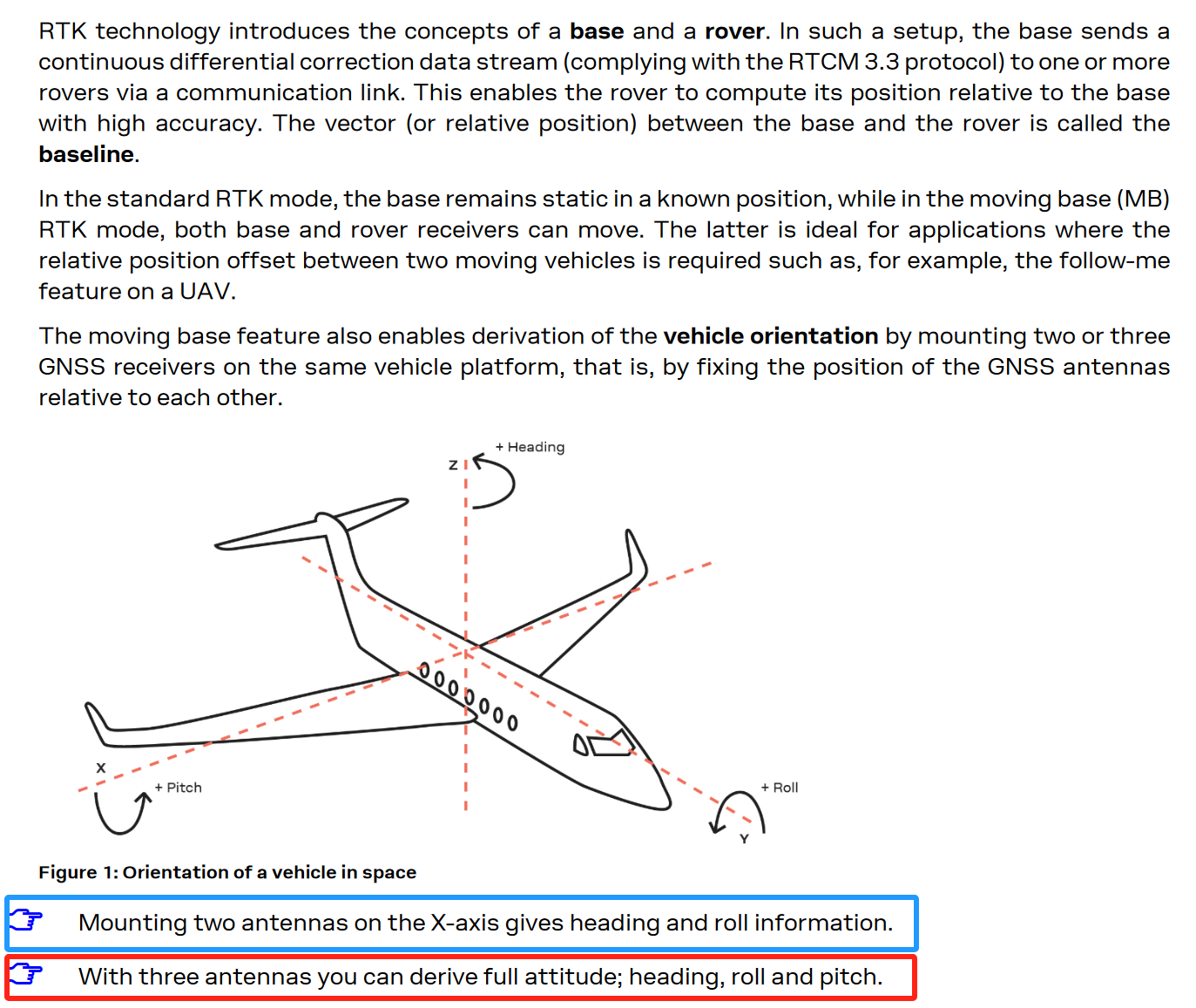
I don’t think two GPS units can calculate direction because GPS accuracy isn’t high. A single moving GPS module can determine the direction. Maybe RTK GPS can calculate the aircraft’s heading through position differences, but the cost seems a bit high.
You can use two GPS units for yaw.
https://ardupilot.org/copter/docs/common-gps-for-yaw.html
It requires F9 GPS receivers. As I read it, the system basically creates a local RTK network on the drone. I’ve never used it, but many others here have.
2 Likes
Yes two GPS can calculate yaw and we don’t actually use the absolute position of the two but their relative position. The relative position is apparently much more stable and accurate than the absolute position.
1 Like
I guess another question I have with this is…
If I buy 2 holybro um982 units, can I configure both of them for magless yaw?
From the Holybro website:
Tips: It is recommended to use the H-RTK F9P-Base or F9P Helical as your base station because it’s simple setup procedure in Mission Planner & QGroundControl. Neither MP nor QGC can configure the UM982 automatically as base station at this moment, additional manual setup is required.
So I’m going to guess the answer is no, Or better: yes, but there’s easier ways to do it.
The Holybro UM982 Dual Antenna RTK GPS provides high-precision positioning information and is capable of generating non-magnetometer moving baseline yaw determinations for autopilots.
You only need one UM982 based module to get GPS yaw.