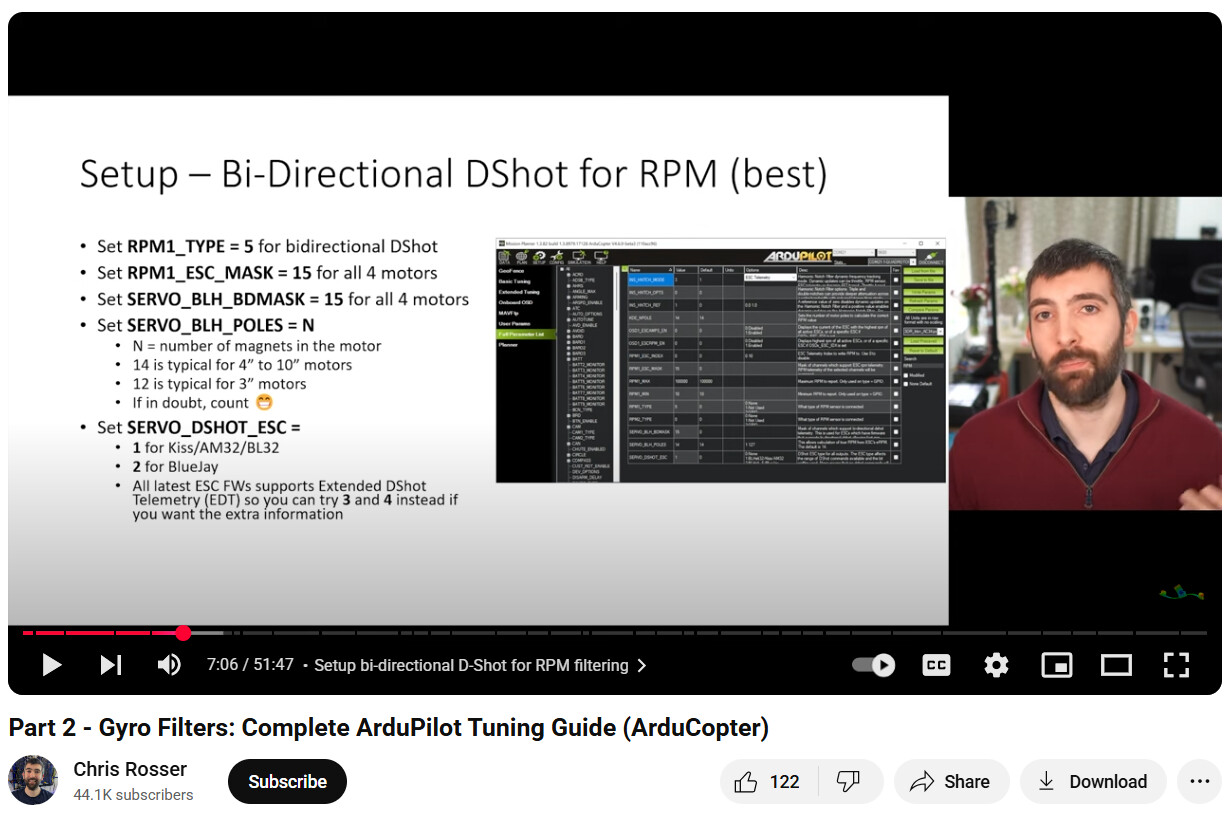
I decided to take a look at Chris Rosser’s YouTube series on ArduPilot Tuning.
In his tutorial, he steps through using an RPM Notch filter using ESC (BDshot) telemetry - and includes settings for RPM1_TYPE and RPM1_ESC_MASK parameters.
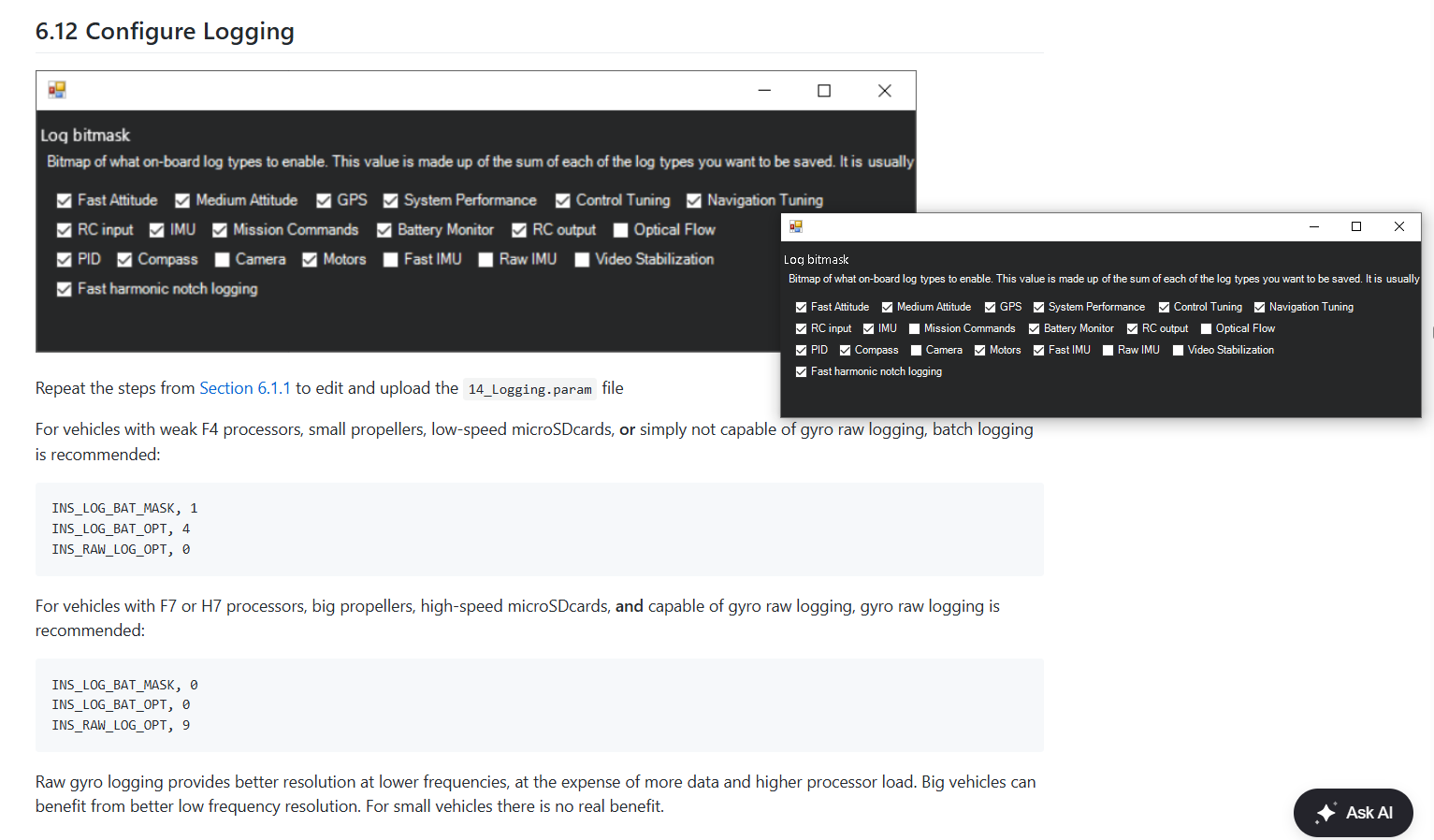
raw gyro log is only advisable on really big drones with big props and H7 processors.
Again this is something AMC automatically does for you: if the two conditions mentioned above are not meet, it falls back to batch logging. How big are your props?
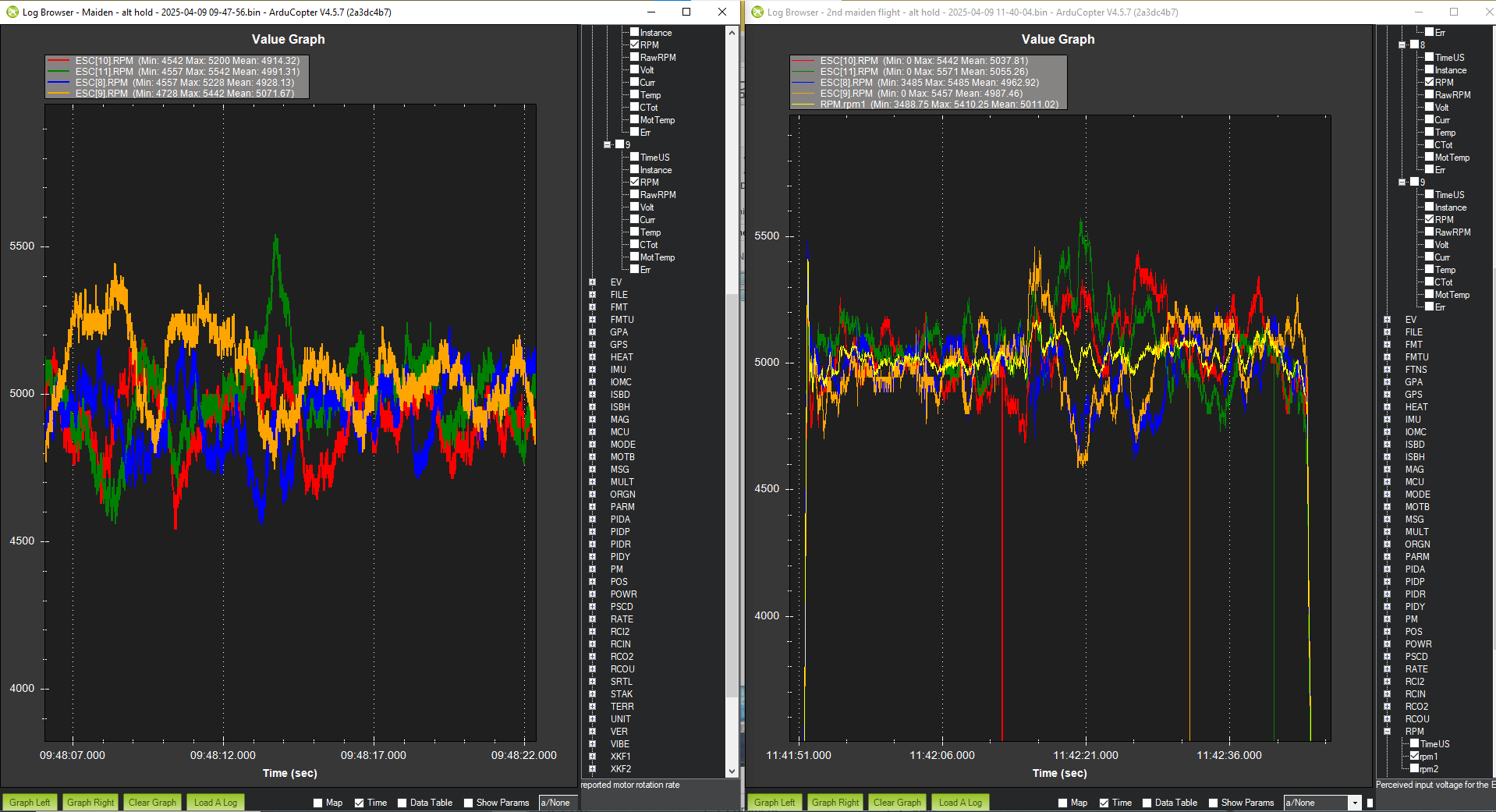
It seems there are two places in the log for RPM data. One is by ESC, and the other appears to be an aggregate.
On my first maiden flight (right side of the screen shot) - I didn’t have RPM1 enabled - and the RPM data is logged for each motor under each ESC. No RPM1 data is logged or available.
On my “2nd” maiden flight with RPM1 parameters enabled, there is now a new RPM1 value in the log - that looks like an aggregate value of RPM. (Left side of the screen shot)
I’m sorry @amilcarlucas - you’ll have to provide more info - I need to know why.
As info - this is the exact same quad I worked through a week or two ago - I just reset it and I’m starting from scratch. (450 class frame using the same drive train used on a Hexsoon EDU-450 - it’s just lighter)
I’m following Chris Rosser’s tutorial, and in his example he’s using a quad with 7" props.
I’m still working my way through Rosser’s tutorial, so at some point he may direct using raw gyro logging. But since when I tried that before (same quad) I got oscillations when I just enabled gyro logging (no filter, just logging) - it seems like a good idea to avoid that if I can.
I’m going through Chris Rosser’s YouTube tutorial on ArduPilot quad-copter tuning.
Just going through the first couple of videos on the series I’ve seen several things that might be good to clarify. As a lot of people may be using this tutorial, I’m thinking of writing a technical article on my website to supplement Rosser’s tutorial.
Good point, I need to update that outdated screenshot, Peter Hall told me specifically to not activate that bit. I have updated the software, but not the screenshot. Thanks for the heads up.
@iampete - could you please share about using the “Fast IMU” bit in the LOG_BITMASK parameter?
I’m going through Chris Rosser’s youtube tutorial on Ardupilot copter tuning - and he doesn’t mention excluding it. I’ll suggest he correct this if it’s a problem.
I have also seen those series of Chris. I did not get why he had enabled both rpm sensor and esc sensor as esc sensor is enough to do the notch filtering?