Sorry to bother, but could someone guide me on this?
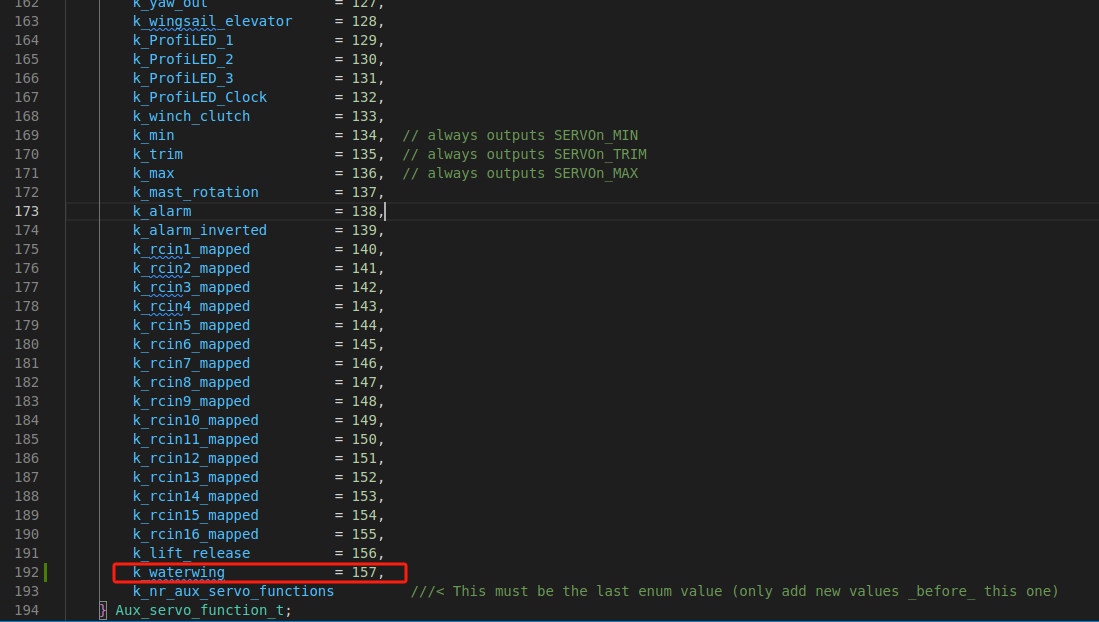
I added k_waterwing = 157, in SRV_Channel.h and added the following in SRV_Channel.cpp:
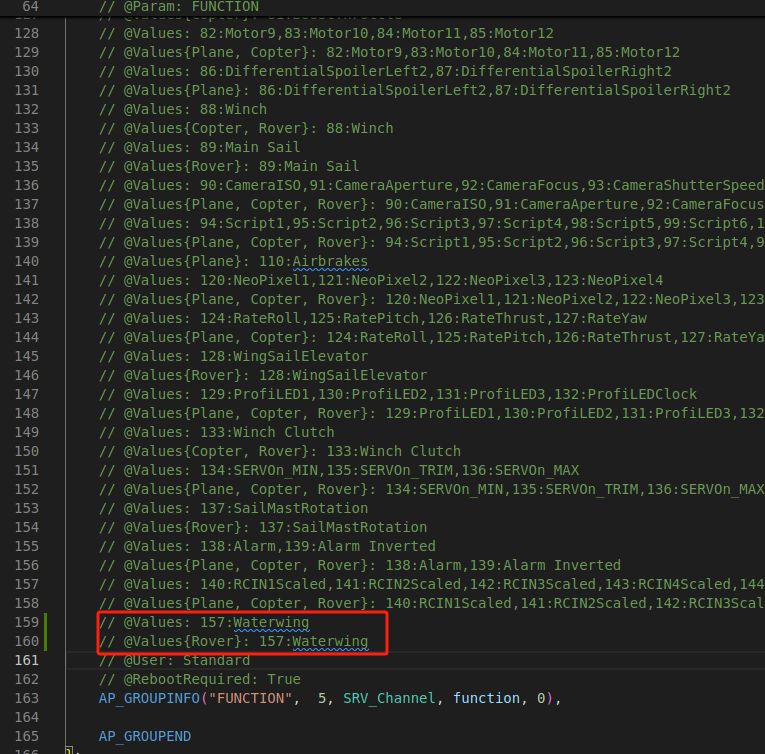
// @Values: 157:Waterwing
// @Values{Rover}: 157:Waterwing
Then I executed the following commands under ardupilot:
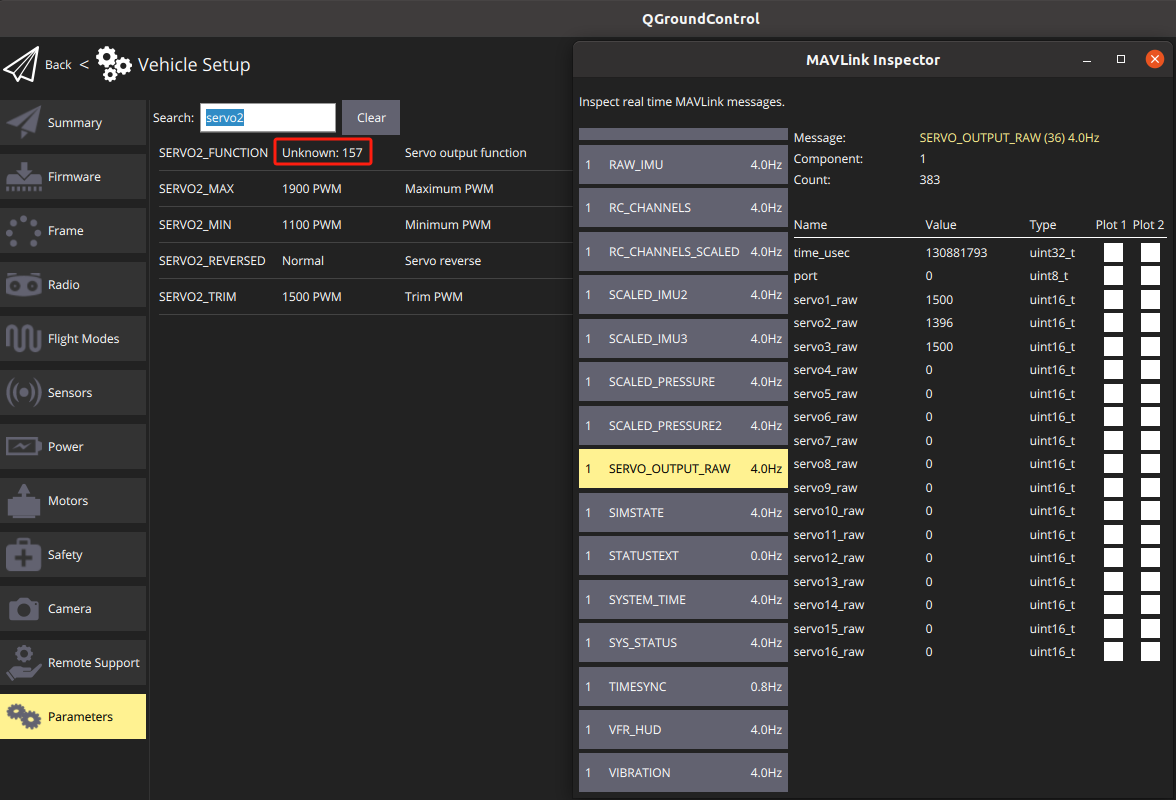
I opened QGC and checked Parameters → servox_function.
First Question: Why doesn’t the dropdown menu show Waterwing?
Second Question: When I use Advanced settings → Manual Entry to select 157, why does it display Unknown: 157 instead of Waterwing?
I’m not an expert at this but since no one else has replied I will give it a shot.
I think the ground control software gets the parameter descriptions from the standard code base, so your new parameters won’t show up unless you have a successful pull request and merge into the main code, or if you modify the files QGC is using. I don’t use QGC much so am not sure about how it goes about it but here are some similar topics related to mission planner that I bookmarked when trying to figure it out in the past. Let us know if you figure it out!
I believe these are out of date but there is still useful info: