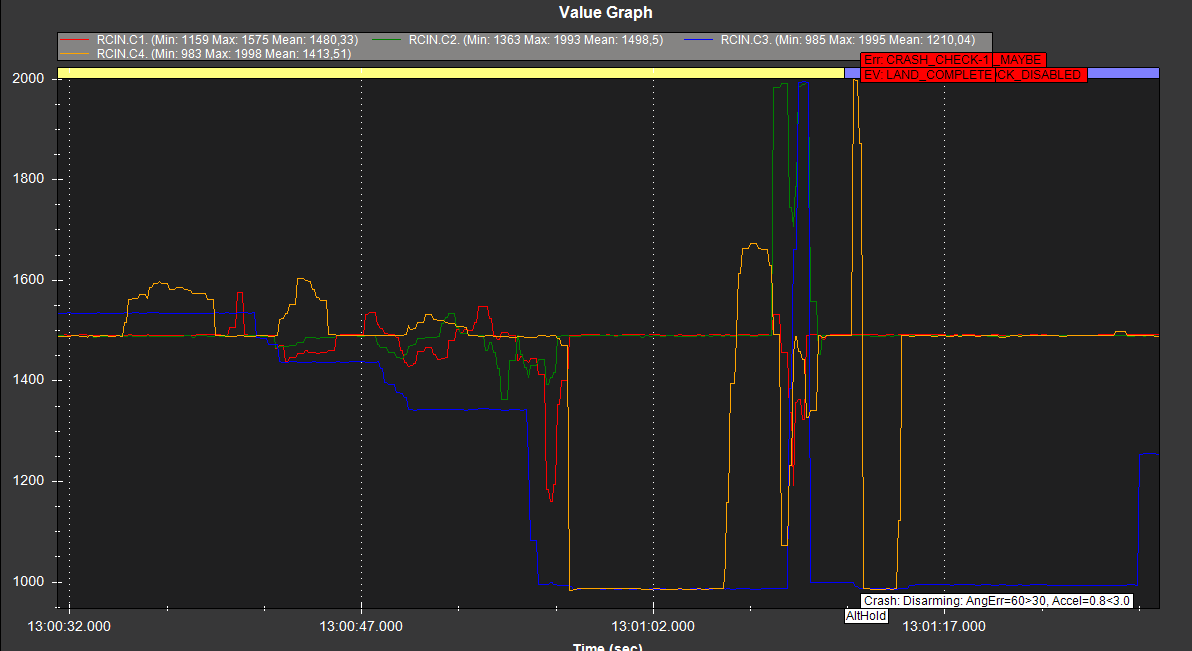
Today we had a capsize once landed. In a test flight in Loiter, which by the way it did not maintain the position correctly in some moments, and when we landed it could not disarm with the stick. Telemetry checked, the positions of the sticks were correct.
I am still analyzing this problem and reading other similar topics, it may be that the cause of it not allowing to disarm is because a landing detection has not occurred.
This flight was during the tuning flights. Just after having performed the autotuning of each axis separately. We discarded the pitch and roll autotuning for having worsened response compared to default values. Yaw autotuning did produce a significant improvement. With these settings we did a test at Loiter, the previous flights at Althold had been satisfactory. During this test we observed a toilet bowl effect and once it stabilized we decided to land. It didn’t let us disarm.
As I’ve read, a flight mode change to Althold wouldn’t have allowed us to disarm either because the landing was not detected in any case. it is right?
I had to use a switch to disarm. I had this problem many times. This drone is set to a max descent rate of 0.5m/s, so if I land 25% on the throttle stick, all landings are smooth. Given the lack of answers, it seems that this problem has no solution at the moment.