Hi all, for the past couple of days I have been running a couple of simulations on SITL to help my teammate debug a quadplane altitude issue, which he had raised in an earlier thread: Quadplane altitude loss on transition
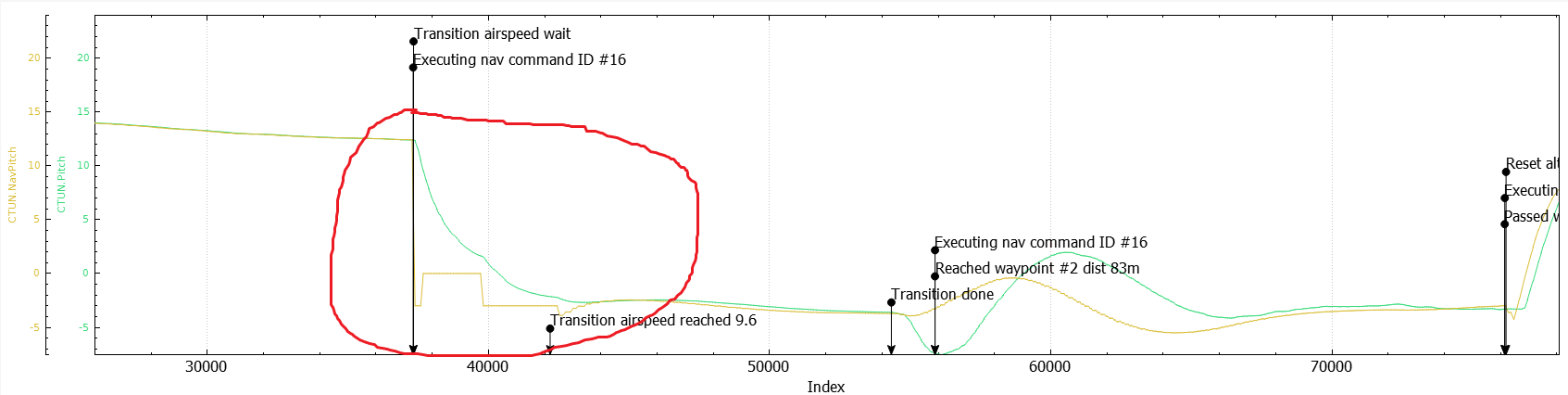
So far I have been doing simple VTOL-takeoff, transition and landing with Plane 3.8.4, and have not observed any noticeable altitude drop. However, I noticed the following: During transition, SITL’s quadplane experienced a negative commanded pitch of -3 to -5 degrees, as shown in the following log image:
Hence, I have two questions which I need help with:
Why does ArduPlane firmware command a negative pitch for quadplanes during transition?
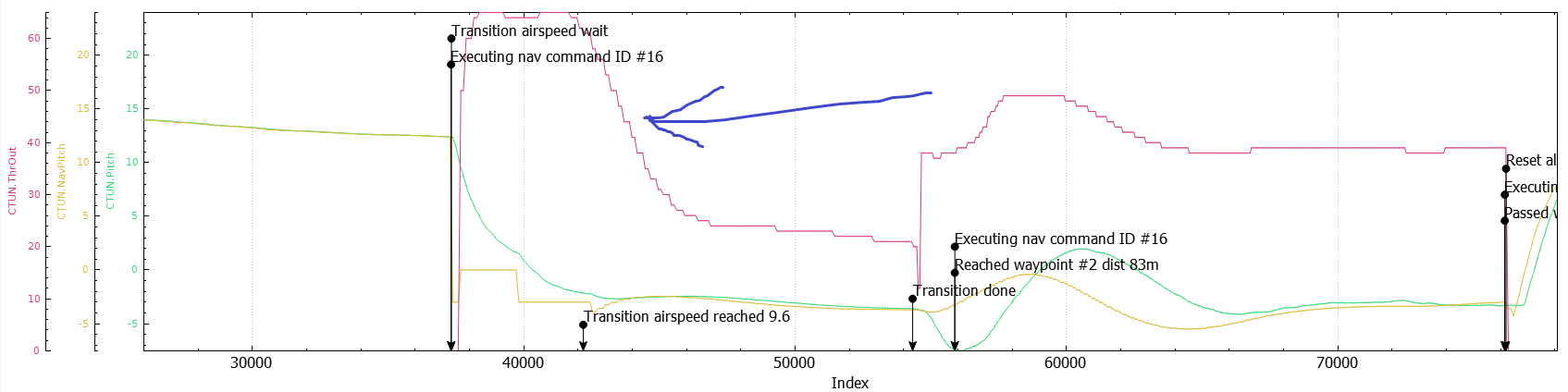
I also observed that the throttle output drops sometime during the transition, and it occurs after transition airspeed is reached, as shown in the next image:
Which leads to my next question: Does this throttle drop, together with the negative commanded pitch, lead to any possible adverse effects for the quadplane, such as loss of altitude?
My test runs so far have been conducted on SITL, with plane 3.8.4 firmware and default SITL parameters (with quadplane mode enabled). It is also worth noting that no observable altitude drop was observed during transition, as compared to the actual quadplane which my team had tested in the earlier-mentioned thread.
Any help from the community would be greatly appreciated!
Hi all, checking in again with updates to the debug process:
Based on suggestions given on the other forum post, we have narrowed down the following parameters that may help in reducing altitude drop:
TRIM_ARSPD_CM: Airspeed which the autopilot aims for in auto flight. This should be set to the desired cruise speed
Preliminary runs in SITL (bin file attached) also show that increasing TRIM_ARSPD_CM results in a higher throttle output during transition. This is desired, as it will help build up airspeed quickly to reach the required cruise speed.
ARSPD_FBW_MIN: Minimum airspeed in FBWA mode, which also determines the transition speed after which the autopilot drops throttle in auto mode. This parameter was recommended to be set to equal or slightly lower than the cruise speed.
Q_TRAN_PIT_MAX: Maximum pitch during transition to fixed-wing flight. Will reducing the value of this parameter help to reduce the amount of negative pitch experienced during transition?
A test run in SITL (see bin. file over here) shows that when this parameter is set to 0, the amount of negative pitch decreases from -5 to -2. This is a desired outcome, but why is there still -2 pitch when the limit is set to zero? What else is over-riding the parameter to generate negative pitch?
We will look at how these parameters affect the quadplane’s performance for our next test flight. In the meantime, if anyone else out there has experienced the same altitude drop problem and has been able to solve the issue, we would really appreciate if you could share with us your debug process!