Recently I’ve been learning about the quadplane source code.
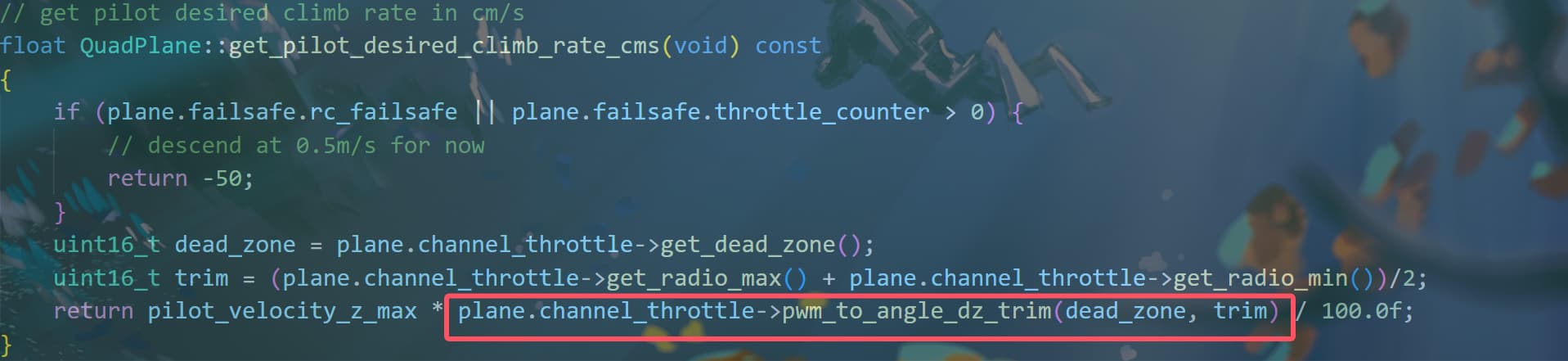
About the “get_pilot_desired_climb_rate_cms()” function, why we use “pwm_to_angle” instead of “to_range”? and then I just think the phrase " return pilot_velocity_z_max*angle" in the function get_pilot_desired_climb_rate_cms() makes no sense? Maybe I misunderstood something?