So when Motors are tested regardless of the frame type they run in the same order. That’s all you need to know when you run Motor Test to determined if you screwed up the Motor Order (as so many do). You could randomly connect the ESC’s to outputs, run Motor Test and re-order them knowing nothing else.
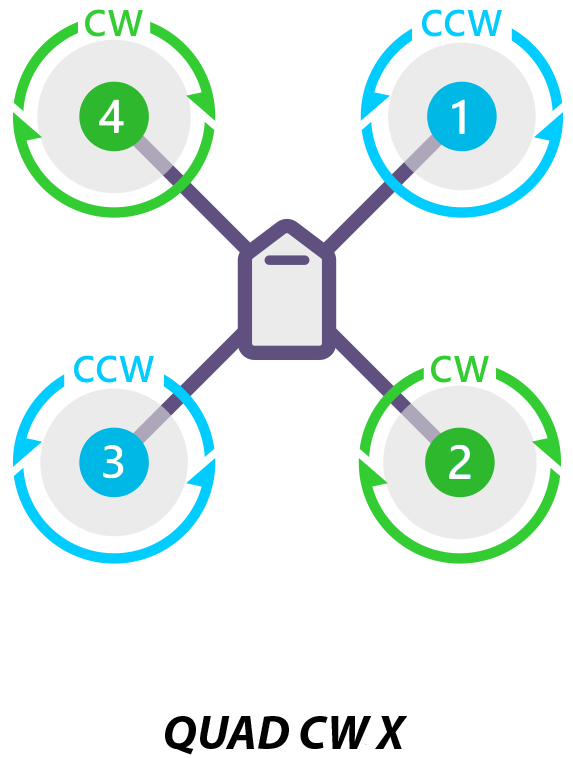
ABCD is the motor order relative to the FC orientation. Take quadcopter X as an example, motor A would ALWAYS be the front right, motor B - rear right, etc.
1234 are the ESC outputs to which your motors are connected. You can assign the motor on the channel 4 to be motor B (Quad X) or you can assign the motor on the channel 2 to be motor B (Betaflight X), etc.
Why? To allow cleaner wiring and save you from the hassle of re-soldering motors to the correct pads since you can re-assign them programmatically instead.
They make it all very easy by having the lettering match the numbering. The wacky ordering as just a left over from before it was possible to reassign output functions to different pins but were stuck with it now as so many vehicles are flying with that configuration.
This is exactly why we have the A, B, C I do not need to know the configured frame type to know if the motor ordering is correct, front right is always A ect.
Based on that question you have missed the point of the letter designations. Go here ESC and Motors
page down to " Checking the motor numbering with the Mission Planner Motor test", read what it says and then apply that to the Tricopter Frame type shown in the same link.
Note: The tail servo will move during the Motor Test also. Kind of a special case.
So starting from the front right and going clockwise (the key to the whole thing):
A-Front right
B-Rear
C-Tail Servo
D-Front Left.
Yeah I figured it’s A, B, C - but then on the other hand, a tripcopter is the only frame that skips a motor number (1, 2, 4), AND I have been having a heck of a time getting the motor settings correct.
Plus almost no one, apparently, builds tricopers anymore, so there’s not much current searchable information, so, I thought I’d ask.
But thanks again for pointing me in the right direction.
After reading your post again you essentially got it right with A,B,D. Nowhere to my knowledge does it say which button activates the tail servo. I confirmed it in the simulator.
So, sorry for not acknowledging that you actually did have it right with published info!
That’s too funny Dave - in my misunderstanding, I came around full circle to kinda getting it right.
Yeah I still have to figure out the tail servo (and am instead thinking about doing a Y4 or Y6 - after building a few quads, I’m just curious to watch a tricopter fly, and perhaps enjoy the redundancy of a Y6).
@wsalopek all you have to do is look at this code file for the translation between Motor number and A, B, C, D. Starting from this line, look at the MotorDef statements. The first one shows – in this order – 2, 4, 1, 3. That is the ABCD order.
whats the diference bettween octocopter X and octocopter clockwise X. we have an issue with these and we dont know wich frame type its the correct for our drone. in our drone, the A motor its CCW
By a Google search for “arducopter motor order” and you will find this document: Motor order
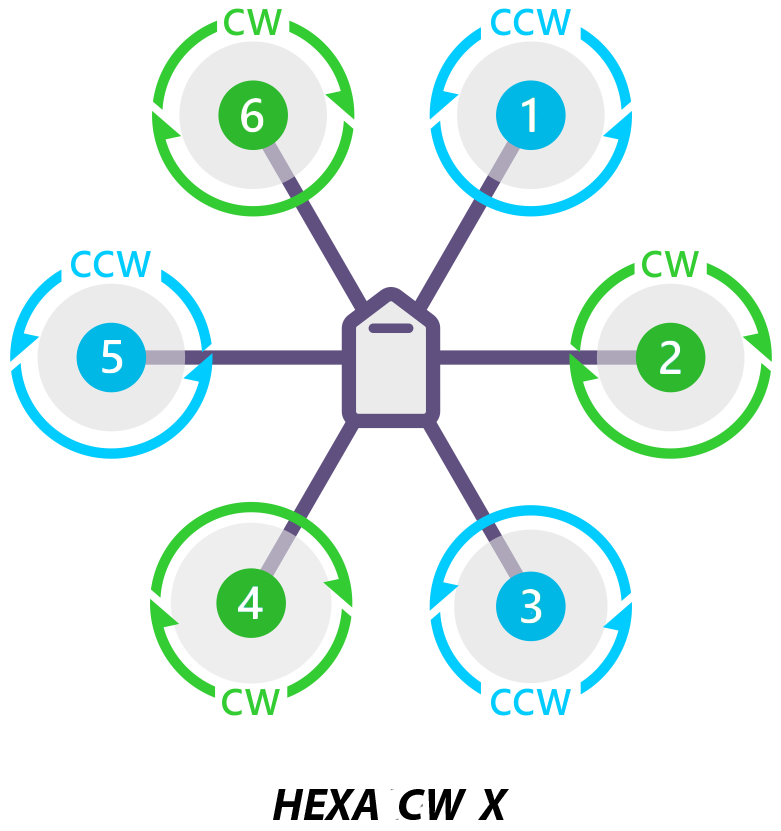
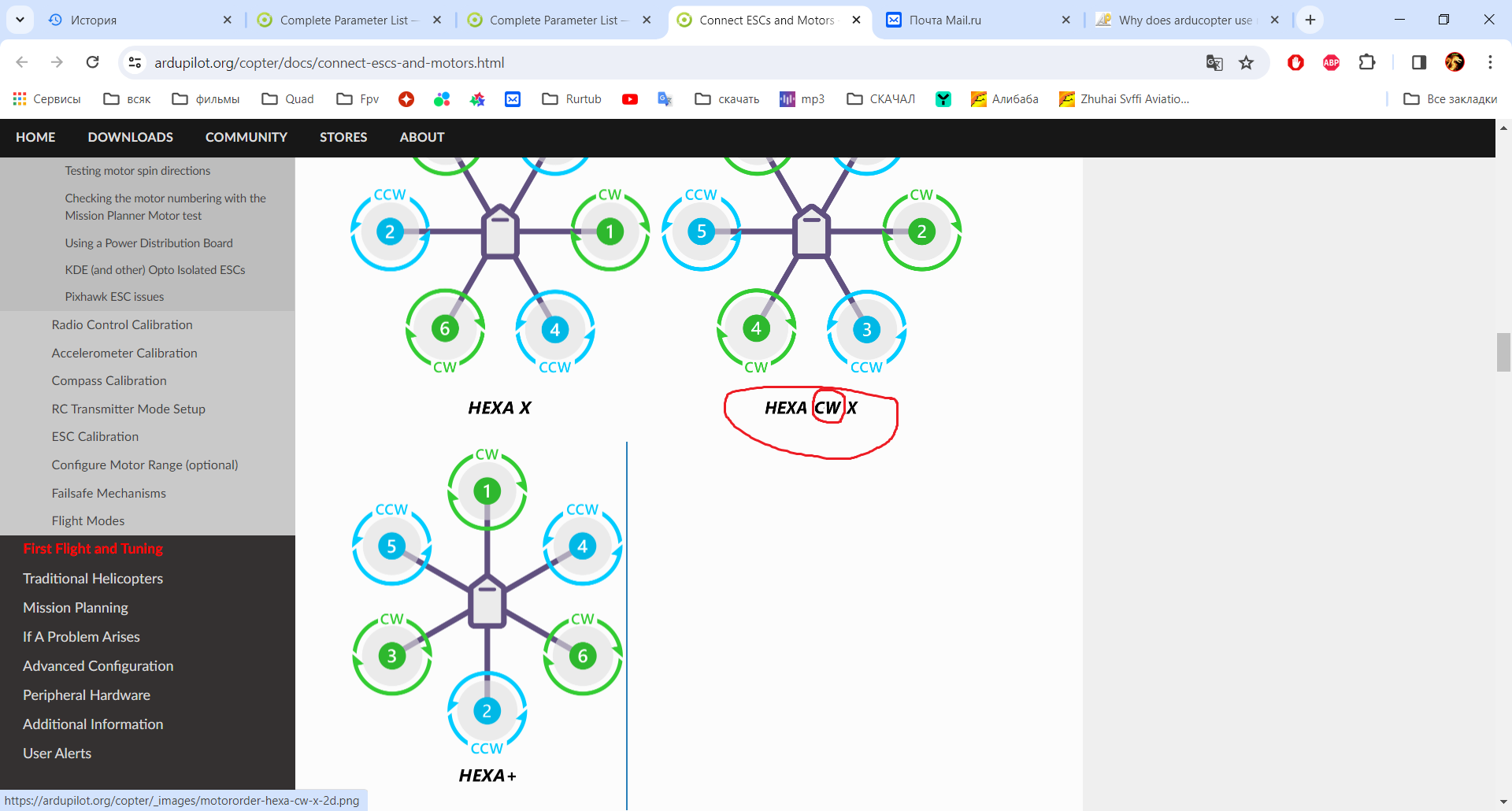
The motor direction is the same for each Hexa choice it’s the motor order that is different.