
Are you certain that the elevator is not reversed ? Starting up and calibrating Plane — Plane documentation
I have checked that when the aircraft climbs, the RCOUT_C2 PWM value will be low, which is correct, and the horizontal wing of the aircraft will tilt upwards, making the aircraft head up.
When the VTOL aircraft was switched to fixed-wing mode, the front motor suddenly lost sound and the aircraft fell. However, there are motor signals from the log file, and the speed continues to increase. In addition, you can judge the decomposition status of the aircraft after the crash. At that time, both the main motor and the multi-axis motor of the aircraft should be rotating
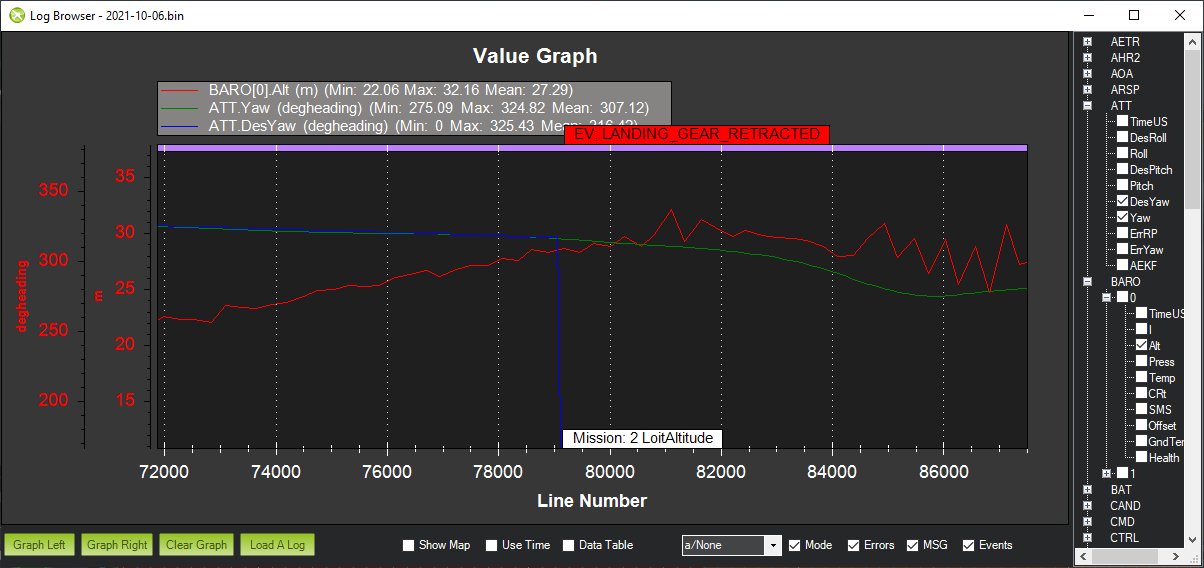
On the start of transition of transition to fixed wing mode, the pitch and roll appear to be ok. However, the rudder completely deviates from desired at this point.


Is this the main cause of the destruction? Why is it so?
Could it be that after the VTOL aircraft is converted to fixed-wing mode, the tail rudder has to guide the aircraft to the waypoint position, so this is the case?
Yes, I believe that rudder is used in forward flight modes and perhaps your compensation setting was reversed. This should have been tested before using an AUTO mission plan.
For an emergency recovery, if possible, be prepared to change modes to a hover mode like QLOITER or QHOVER or QSTABILIZE.
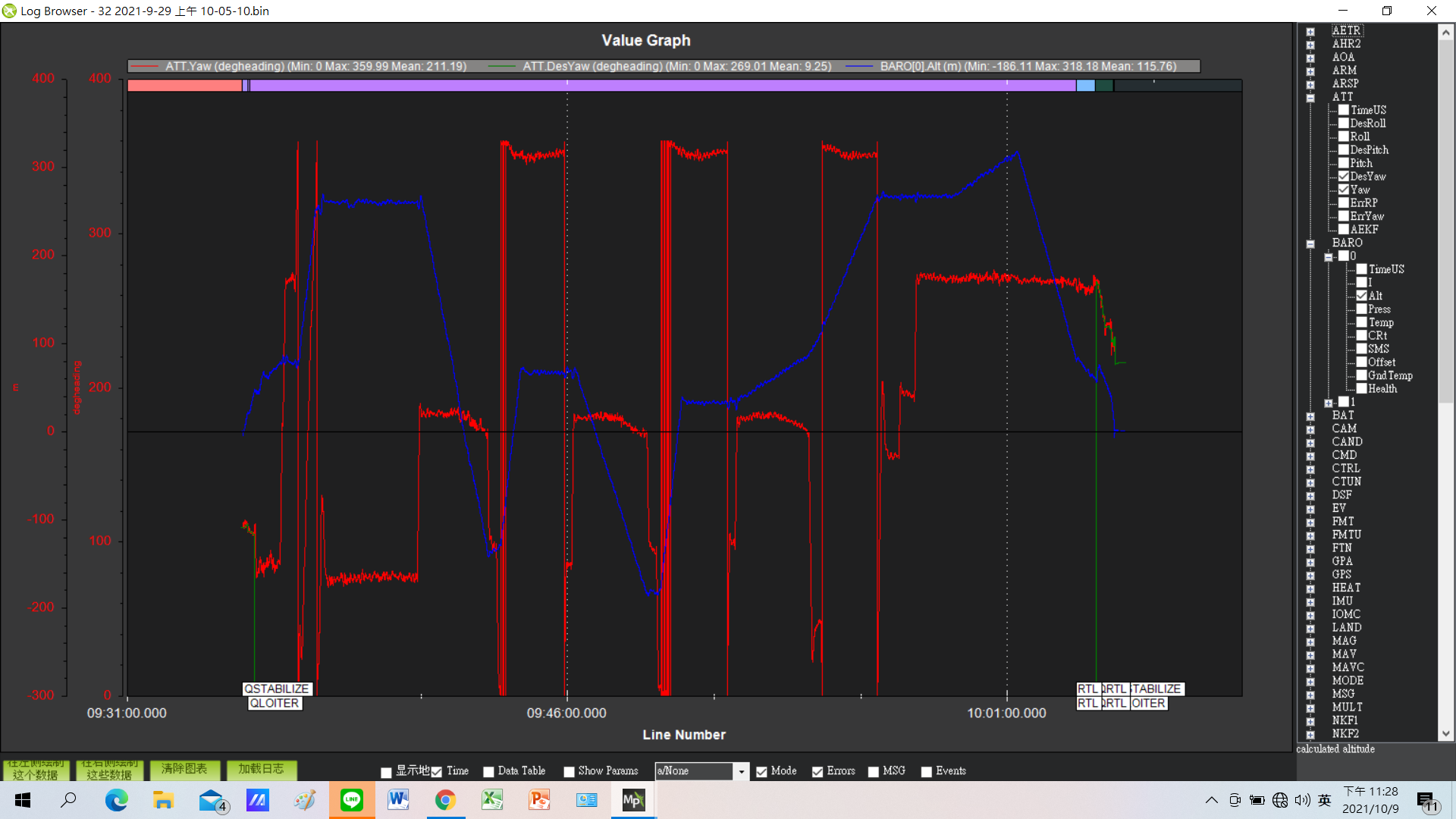
This is another flight data from before. It shows that yaw has been at 0 degrees from AUTO until it is normal after Q_RTL.
I found that when I test on the ground, if I switch the AUTO mode with GPS, there will be no corrective action when I move the aircraft fuselage YAW left and right. Is this normal?
Yes, your KFF_RDDRMIX is set to 0 so I no longer feel that rudder control was the issue.
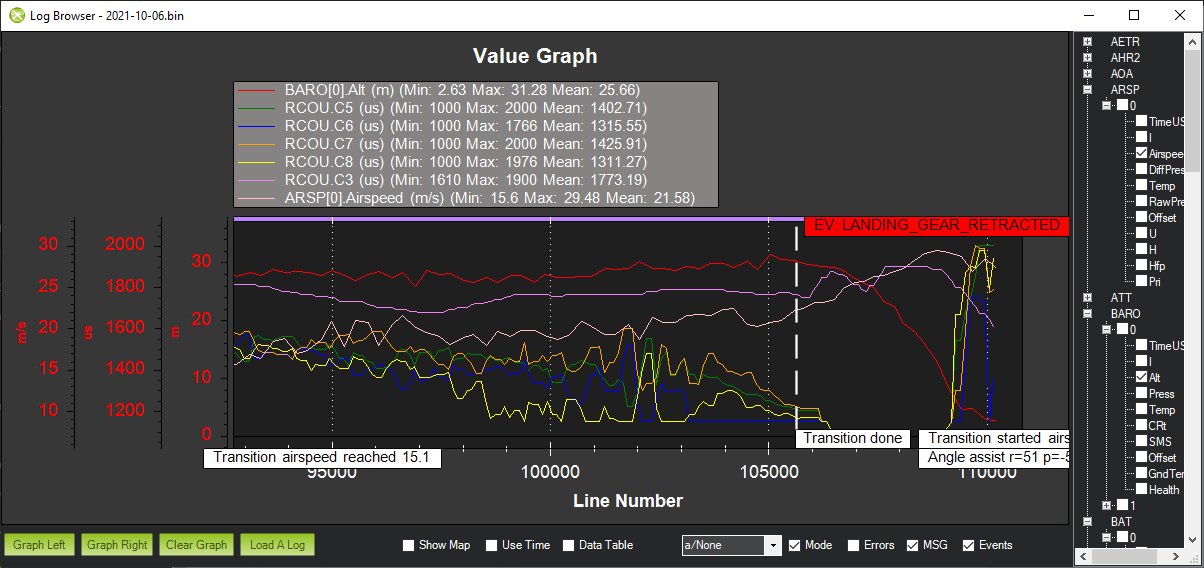
Something happened just after the “Transition done” message when you entered FBWA mode. The speed was good and the quad motors turned off properly. The forward flight motor control was working fine but the plane started pointing down.

1 Like
@blue0827ww
Did you really checked on the ground in FBWA mode that there is no reversed transmitter ch2 and reversed elevator output ?
Sorry, but this is not an adequate check and besides RCOU.C2 behaves exactly the opposite way:

At the beginning of the tranistion you can see (A) that at higher PWM values at the elevator servo the nose (pitch) goes up.
Exactly after fading to wing control (B), pitch deviates dramatically more and more nose down from desired pitch.
The “double reverse setting” can be well recognized when you pull fully on the elevator stick (blue line) and Elevator PWM rises as well as Pitch rises again.
1 Like

In fact, the direction of the deflections in FBWA are correct. Nevertheless, the question arises as to why the elevator was controlled to sink (“B” in the graphic above).
You have 2 elevator servos (C2 and C10) which are controlled in opposite directions. Could it be that you accidentally swapped the connections during assembly ?
1 Like
1.Thank you for your reminder, I just swapped the two lines of SERVO2 and SERV010, and also corrected SERVO2_REVERSED and SERVO10_REVERSED
2. Will this error cause a crash?
If this could have been the cause, you can try out by testing on the ground what happens due to swapped lines. I am curious.
Before this error occurred, I had flown several times without falling, but this time the fall happened very strange. When the aircraft was raised from the vertical to the fixed-wing mode, the four motors were turned off and the main power motor stopped at the same time. Rotating, the sound of the main power motor is not audible at all at that time, but the motor is rotating and the speed is normal when viewed on the log.