Hi. I’ve been looking at using a sensor with my SkyViper Journey drone, and have decided that I will control the sensor with a separate processor and just send appropriate MAVLink messages to the Journey’s board. The connection between the two is going to be wired, and likely UART.
I was wondering if anyone has had experience doing this, and also if anyone knows where is the best place to connect the wire on the Journey’s board.
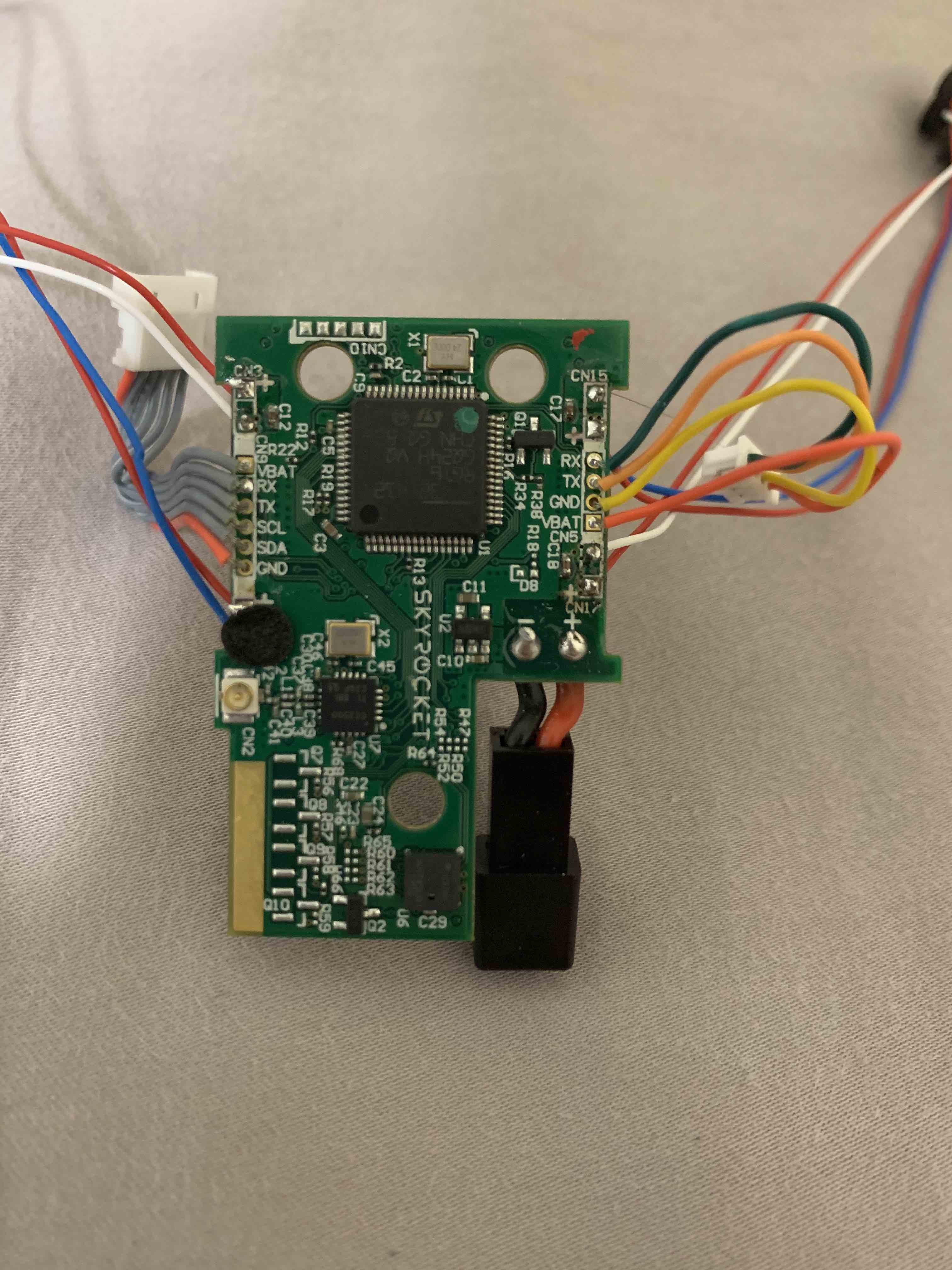
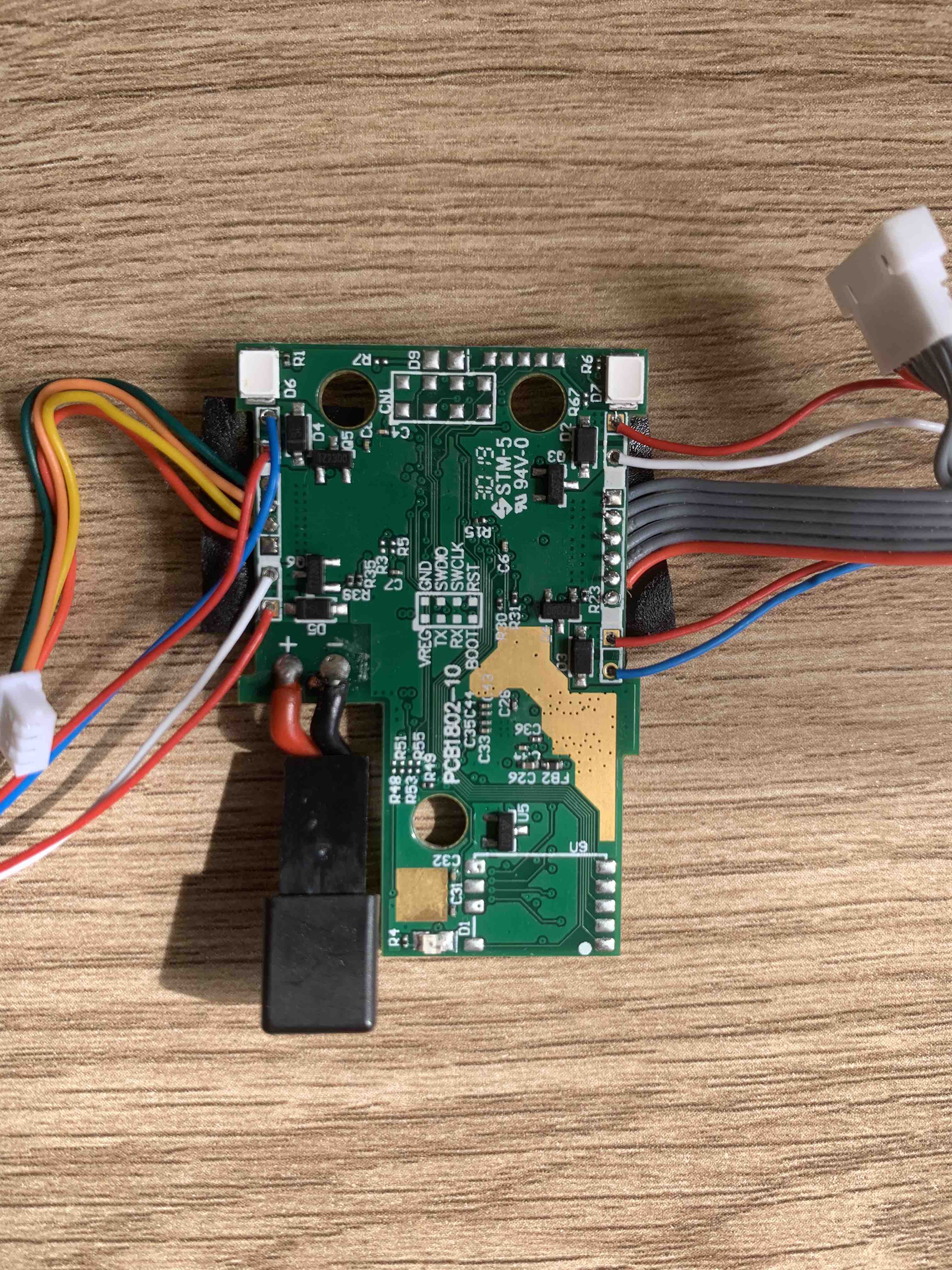
Pictures for reference