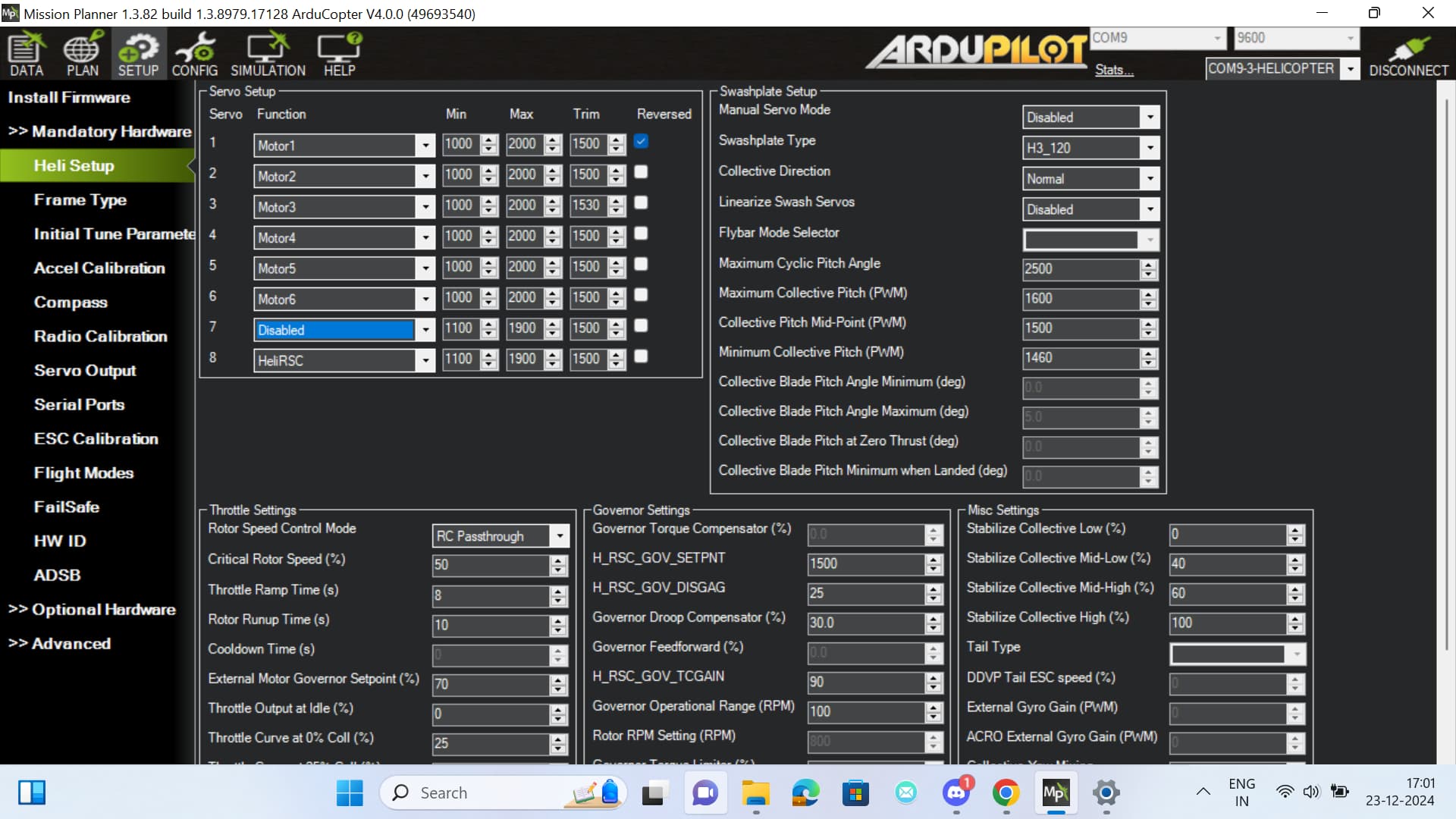
As im using the Dual heli mode which as two motors for main props. but in mission planner heli setup there is only one HeliRSC is selected in main out 8 port. where also there is no option for 2nd motor. there is only HeliRSC and HeliTailRSC.
Are both of your main rotors variable collective pitch/have a swashplate? I ask because there is sometimes confusion between bi-copter and dual-heli.
In the screen shot it looks like you are using passthrough, if that’s the case I think you can just setup any other channel to also be passthrough but it just wont be labeled as an RSC.
What ESCs are you using? Do they have governor? Are you wanting to use Ardupilot for governor?
I’m still curious about the answer to this. I have not seen where any of the trad heli stuff supports more motors for anything in RSC so no second main rotor throttle output and no second gov configuration. It got me wondering how to best setup something like this up.
There are RC kits out there like the Rotormast V-22 that use 2 motors and 2 swashplates with 2 main main rotors and it tilts. Would it be possible to control something like that in ardupilot? Would it be some tilt rotor airplane or some sort of heli? How would the motors be hooked up? Seems like the only options would be ESC with built in gov then throttle splitter cable or maybe some sort of dual RSC channel output configuratio? Then full swash, servos and tilting, not even sure where to start with the best way to try and tackle that in ardupilot.
The Helicopter part of that thing would be a side tandem config, which is supported.
Ideally both rotors should spin at the same rate, one RSC signal would be enough to pilot both ESCs (which will be operated in governor mode). There is one possible issue with this approach though: RPM mismatch between the two motors, it would need some xtra coding to do the synchro.
this is the missing bit in the current code, transition from trad-heli to plane. Probably not too complex but I would start with a RealFlight model development ( the included V22 model does not feature cyclic/collective pitch control)…the kit you linked is a little too expensive for what you get (considering the original controller would not be used). Also it doesn’t have any plane control surfaces, It uses cyclic pitch for all flight phases.
Hello Thank you for your replay. only one rotor has swashplate and another one is fixed. im using normal ESC only without governor.
Top Rotor:** Fixed-pitch propeller.
Bottom Rotor:** Variable-pitch propeller, which I intend to control for adjusting thrust.
Frame Type:** Coaxial (with one rotor above the other, aligned along the same axis).
I’ve come across some general coaxial drone projects (such as the T-Drone open-source build) and found that they often use custom settings, so I’m open to suggestions on how to modify ArduPilot to fit this design.