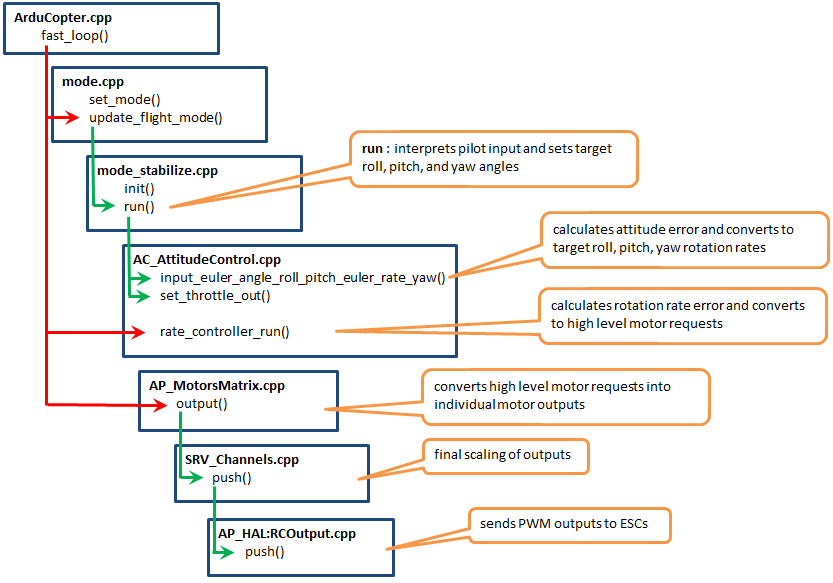
I have a question. From my understanding, the ‘fast_loop()’ in Copter.cpp is the main the scheduler task that comes first and takes care of reading IMU, calling motor mixing and all other core functions etc. The other tasks in the scheduler table follow.
However the fast_loop() isnt included in the scheduler table defined in Copter.cpp so where is it being called? I thought copter.cpp was the first file executed according to this image (From the docs):
Image
{kind=link}
Which file is the very first executed?, Is it a scheduler file because the scheduler initializaiton and calling of fast_loop() etc. isnt in copter.cpp and unless im blind I cant see another file that looks like an entry point to the whole thing calling those functions?