Now, the question is where to connect the 433 MHz telemetry for the autonomous flight of this drone?
I am not using the DJI camera system, so the plug-and-play pin is unused.
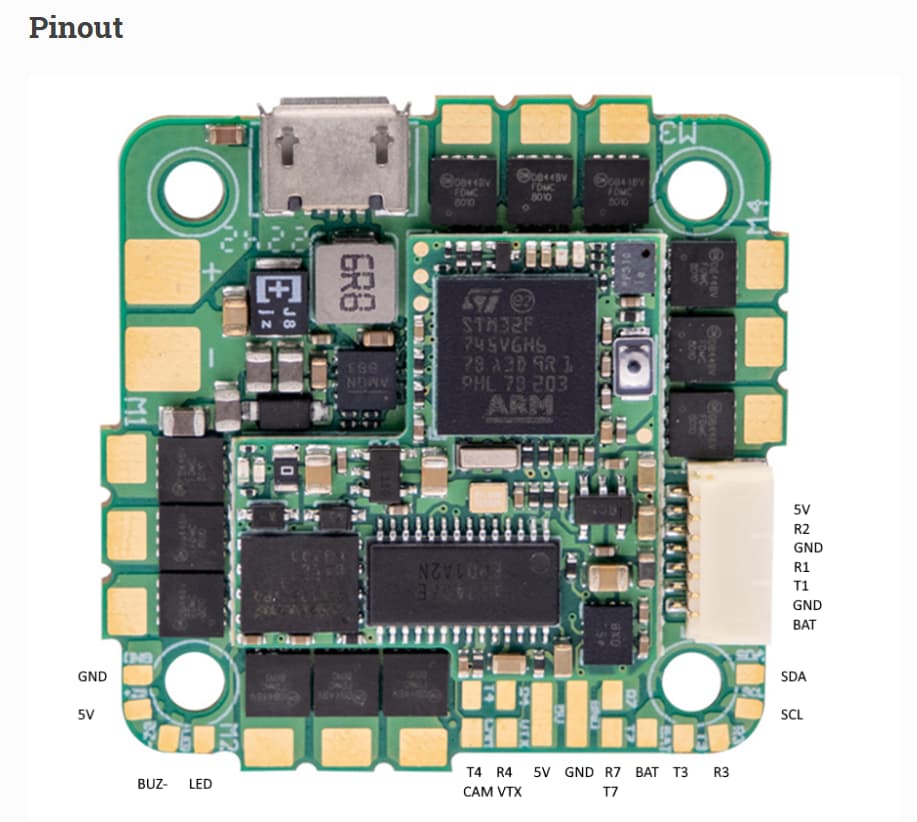
R4 and T4 for GPS connection
T7 is used for the Receiver
R7 is unused
5V and GND are obviously in use.
R3 is unused
T3 pad came out with the cable after a day of soldering. So, that pad is now useless.
I have SDA, SCL, and all the LED and buzzer pins unused.
Let me know if I can use any SerialX Protocol pin that is already in use (with 57600 as the common baud rate). OR in case there are any other ways out.
A little out of the way, another question. In Betaflight, we have angle and acro mode. In Ardupilot, we have multiple modes, including Loiter and Altitude Hold. This one is a tiny drone which I have flown on Betaflight with ease, just due to angle mode, as I do not use goggles. What will happen in the Ardu pilot? Will loiter mode work as it does in bigger drones, or is there any process of slowing the drone down? And for Drone size below 200mm also, the autotune process remains the same?
option 1 - easyway
move gps to R7 (FC can accept RX only from GPS it just can’t reconfigure)
and use R4/T4 fore your telemetry
option 2 - need added esp32 like wroom32 it’s only $2
connect esp32 to R4/T4
set that port to mavlink
create one serial port on esp32 to receive
and create two serial port (one for your telemetry - passthrough)
and one for your GPS
incoming GPS you need to send (inject) into telemetry (to FC) with mavlink_msg_gps_input
dont forget to set gps_type to 14