I input parameters from the closest reference frame, autotuned it, then a year later I added a larger battery, a gimbal and a camera (+ Vtx & OSD). Is changing the payload enough to warrant tuning again? The gimbal is ‘wobbly’ and I’ve heard that can cause problems. But if you can’t tune after installing a gimbal, how do you?
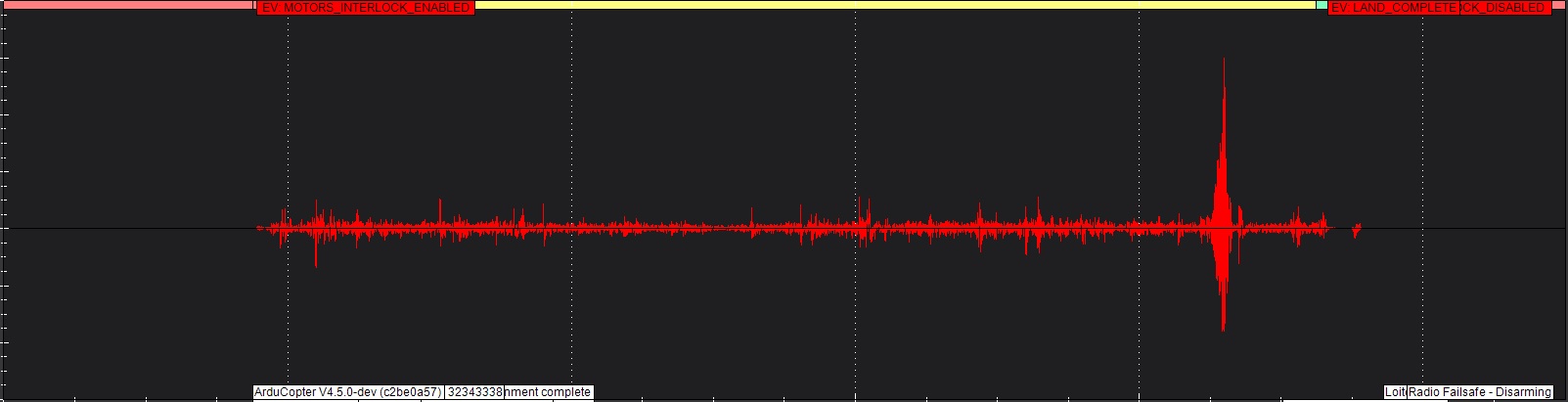
On my last flight it toilet bowled in loiter. I checked the parameters and I had compass 1 and 3 enabled; I don’t have a compass 3. So I turned that off. Otherwise the parameters are exactly the same as the toilet bowl flight. I can see the vibrations spike towards the end of the flight, but I can’t identify a cause.
I see several little things, but I’m not sure what’s the chicken and what’s the egg.
You could try running Magfit on the compass. I ran it on the two compassess but you might want to do a specific test flight to collect better data and run it again.
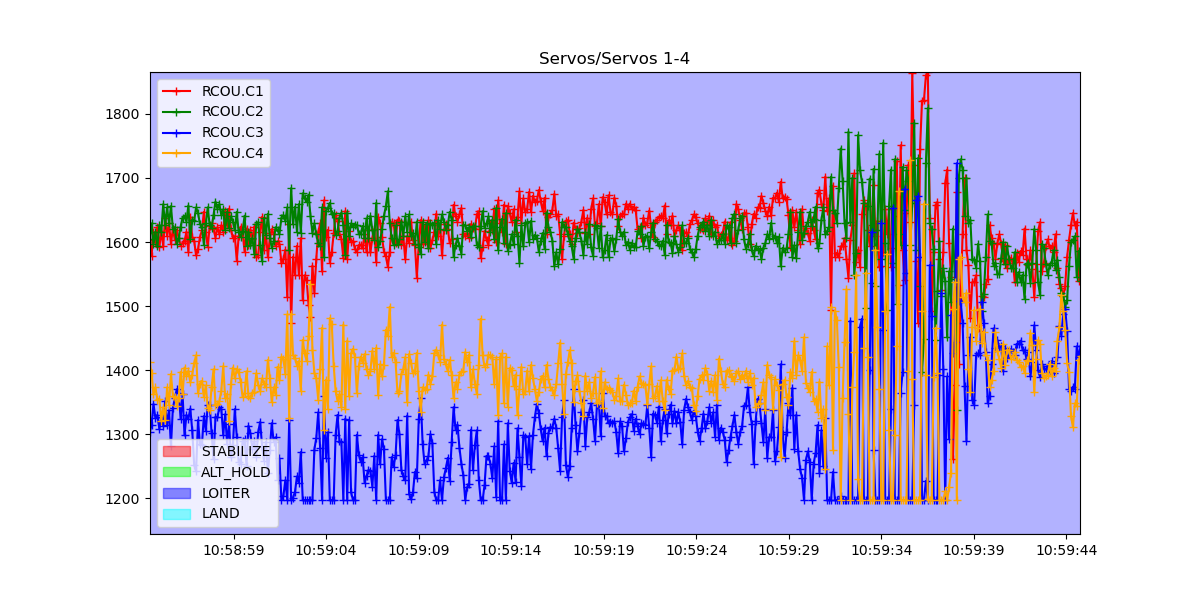
There seems to be a bit of a torque imbalance in the motors. Usually this means that an arm is twisted. It’s not the worst I’ve seen but it’s there.
On several occasions motor 3 is down to min, and at one point motor 3&4 are oscillating off mins. Double check the MOT_SPIN_MIN and MOT_SPIN_ARM values by using the motor test function in mission planner. They may need to come down a bit.
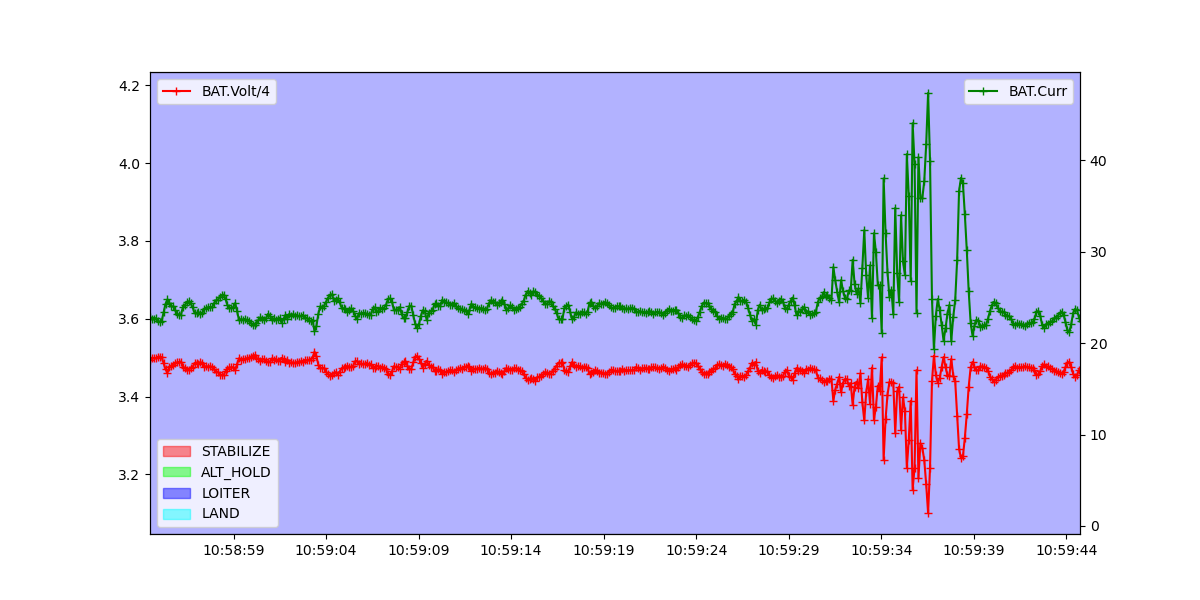
The battery voltage in the later portion of the flight is low, 3.4 v/cell. Okay if this LiIon, but if that’s LiPo that’s too low. There’s a momentary spike, but I think that’s a symptom of the motors going crazy
Thank you for the replies/information. It’s going to take me a while to parse that. I will try to resolve the issues you brought up and then run autotune again.
The battery is a lipo. I am still trying to figure out how to accurately measure its voltage in flight. When BATT_FS_VOLTSRC = 0, it complains of low voltage about 30 seconds after taking off, and failsafe lands after about 2 minutes. When BATT_FS_VOLTSRC = 1, it never failsafes, the telemetry on the RC and the telemetry on the OSD don’t match, and also the battery voltages are different across the two displays and I’m not sure which one to trust. I normally land when the higher of the two voltages is 13.5V, 3.375v/cell. I didn’t know that was too low.
I’ll run the motor test function, and see if those MOT_SPIN_* values change. There is definitely a torque imbalance. The bolts that hold the arms upright in their sockets are too small for the holes drilled in them. There’s wriggle room. I wrapped teflon tape around the arms to stop them from wobbling, but I haven’t permanently glued them in position. I was going to wait until after I had all the parts on it (I’m still waiting on a lidar + optical flow to arrive), to glue/loctite everything in place. If the arms being twisted is what potentially caused the toilet bowl problem, I definitely will ground it until everything is installed and squared away.
By the way, what program did you use to make those graphs? that’s not the log browser, is it?
There’s lots of answers about what voltage to land at, but generally running a lipo below 3.5v/cell is considered bad practice for the longevity of the cell. That battery dropped from 4.2 to 3.8v’cell almost right away. I wonder if that battery is either too small, or is already damaged.