Hi,
I’m a fan of ArduCopter for a number of months now, I’ve trying to build a copter dedicated to photogrammetry on an Alien GF680 frame.
Step by steps reading the wiki and the forum I tried to manage to set the chute, the camera but this time I 'm lost trying to find an explanation on an autotune crash.
Any help would be much appreciated to work out what went wrong.
Hardware & Software
Pixhack CUAV Version 2.8
Firmware Version V3.4.2
680 mm diag frame
Sunnysky X4110S 580KV
40 A ESC DYS with SimonK,
4S 10000mAh,
15,5 " wooden propellers
The chute and its launcher are on and the a gimbal is tied.
Total weight 3,500 Kg
Taranis Tx/Rx FrSky
Crash Description
Flown well previously in stabilise and alt-hold mode.
No desync on each esc-motors noticed during ground test. See this video : 0 desync Test
The flight was conducted indoors for autotune with stock PIDS.
The autotune (with severity 0,1) was hard to engage even thought the autotrim mode done.
It has been engaged with the roll stick slightly righted.
After a shot period time, it stopped. It started again with the finger on the roll stick and autotune became auto-crash.
Understanding the issue
Trying to read the logs I noticed that a bad power calibration.
According to me it can’t be the well know desync problem observed on large copters with motors with low kv, because all the 4 motors have been tested with their esc after the crash with no pb
But watching the crash video a motor (right-left) stopped, that’s obvious.
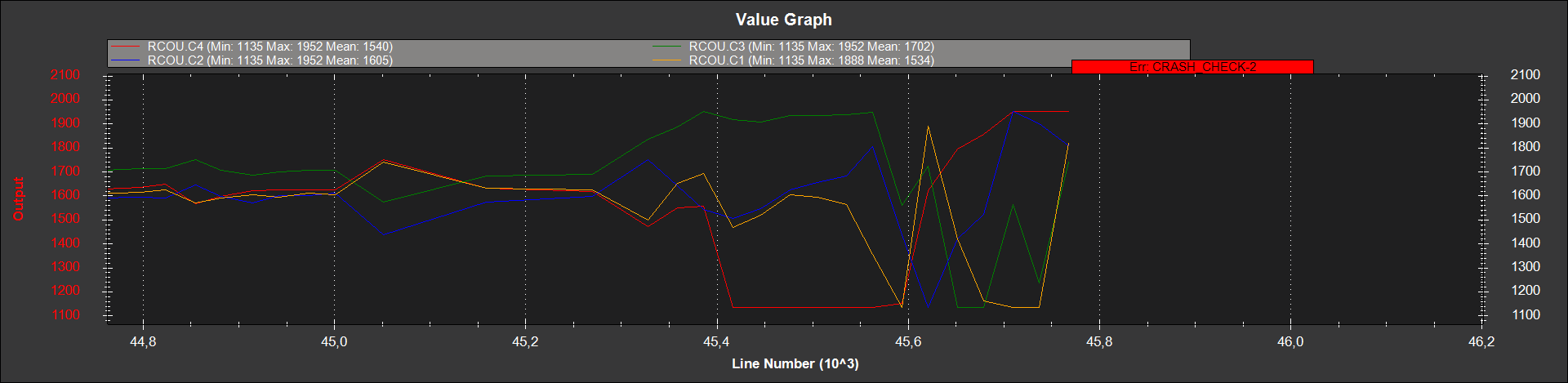
Looking at RCOU parameters, the motor on RC Out 4 stopped for a very short time with a value of 1050 pwm : that’s to say no order sent from flight controller to the esc/motor/RC output.
It’s sound weird to me
In a nutshell, it looks like that the autopilot stopped the motor on RC out 4.
What do you see and read?
Thanks
Bertrand Carpenter
[log attached] (https://drive.google.com/open?id=0B1GFuhp7AdeMNGROY0tXeFlDdFk)
and [videoCrash] (https://drive.google.com/open?id=0B1GFuhp7AdeMVkhvSUZCWktWX3c)