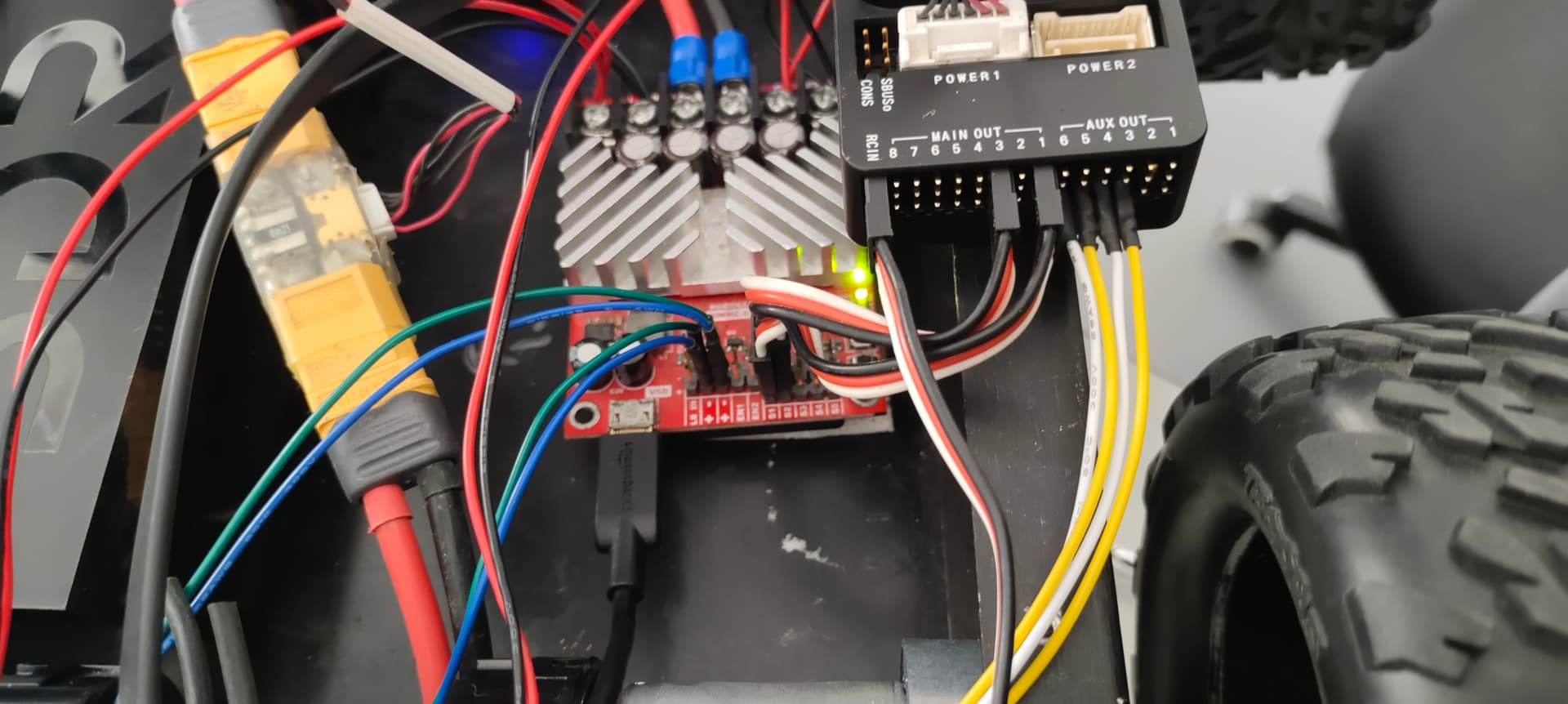
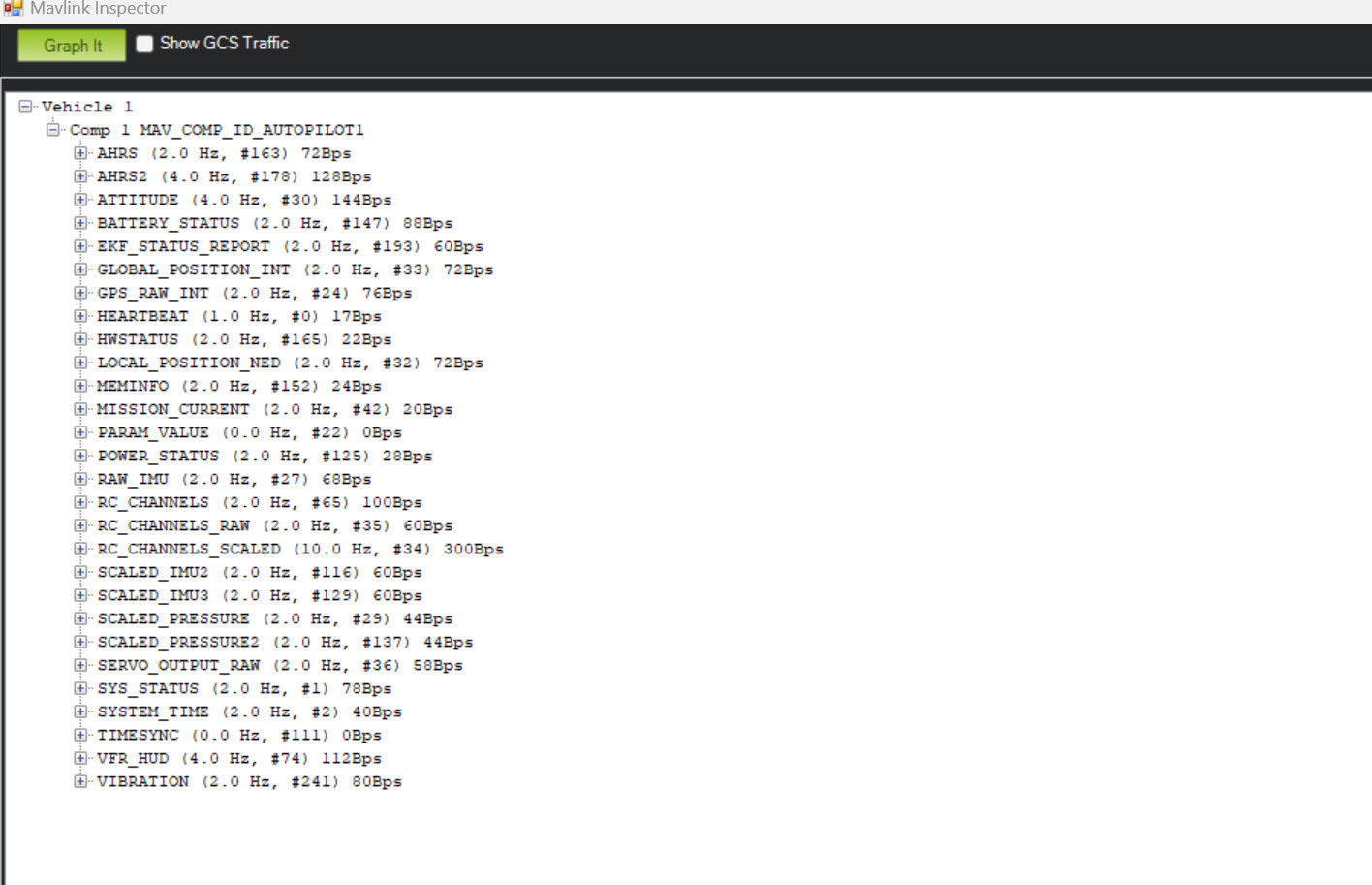
we are trying to get the quadrature wheel encoders count from pixhaw so we followed this link and set all the params as they mentioned but was not able to see the wheel distance message in the mavlink inspector following are the pictures of the connections and the parameters list of ardurover 4.2.3
If that helps, with balance bots I adjust and check all wheel encoder parameters arming, driving forward a fixed distance as straight as possible at home (around 11m, wall to wall), disarming, and observing WENC distances on MP.
You should end with two straight lines. The distance indicated should coincide with the distance you moved (11m in my case). If not, check CPR’s and radios.
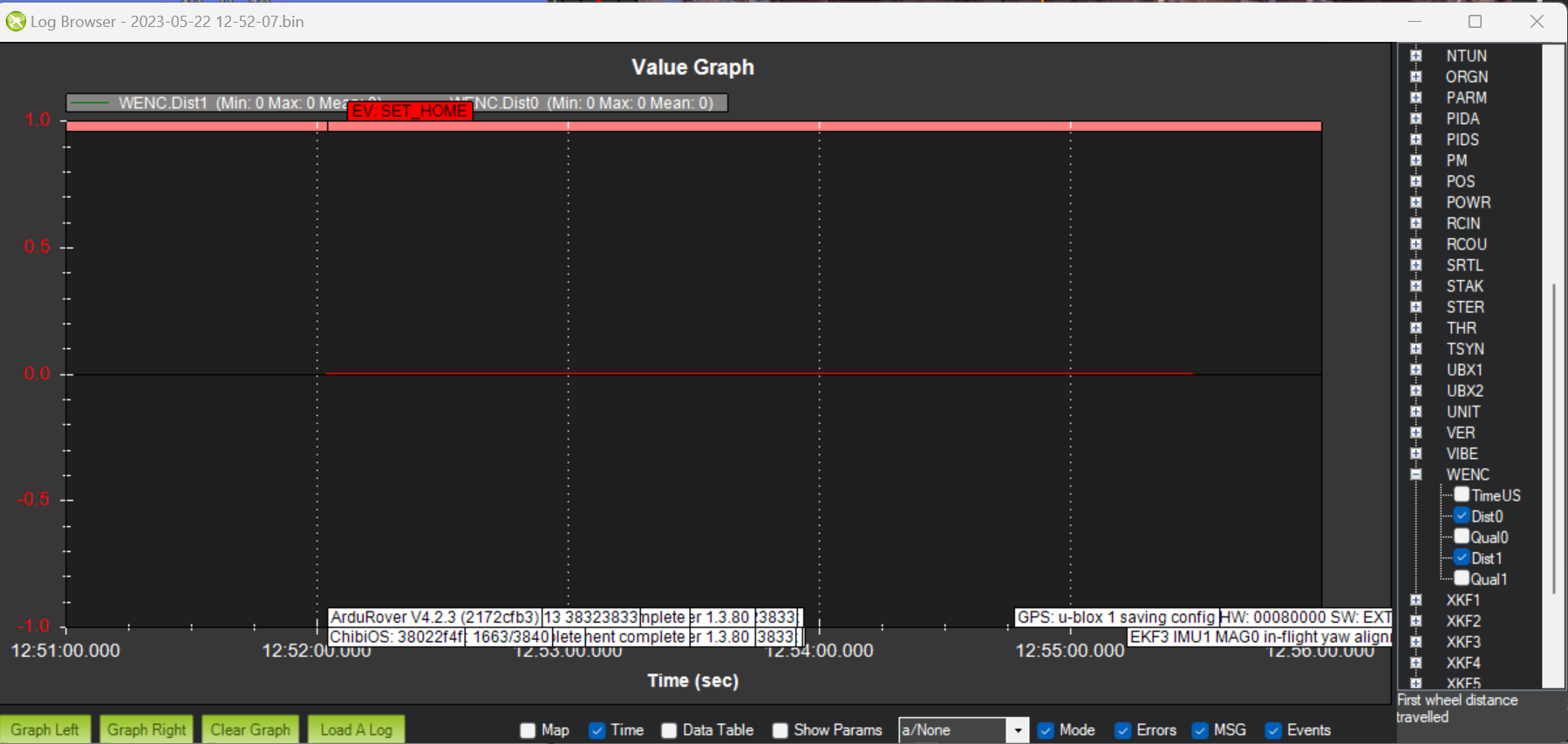
If there are any factors we are overlooking, as you said, we examined the dist1 and dist0 in a log file but the number stayed at 0 and did not change. If you could throw any light on this, it would be very appreciated.
If dist0 and dist1 are 0 there is a hardware (on encoders or FC) or configuration problem.
First check parameters, such as:
WENC_PINA,53
WENC_PINB,52
WENC_TYPE,1
WENC2_PINA,54
WENC2_PINB,55
(rest of WENCx's)
Then check hardware: supply to encoders, connectivity, etc. If you place an oscilloscope probe on the FC pins receiving xPINx’s above you can check signals.
On your cabling:
I suppose those pins receive supply on MAIN 1 or 3 (only one unless electrically the same).
On your parameters:
WENC_PINA,55 <- AUX 6
WENC_PINB,54 <- AUX 5
WENC2_PINA,53 <- AUX 4
WENC2_PINB,52 <- AUX 3
So, are the wheel encoders supplied? Normally the encoder supply should be at +5V or +3.3V, the red cable at MAIN’s (central pins), which appears unconnected at AUX’s.
Also, recall that 1 refers to left wheel signals, and 2 to right wheel signals. So for clarity and easy remembering and checks better assign low numbers to left wheel signals.