i was playing with some parameters came up to Q_tilt_mask its value is 3 for 2 rotor tilt and one single motor … 15 for quad … if there are three tilt rotor for tricopter what should be the vale for this.
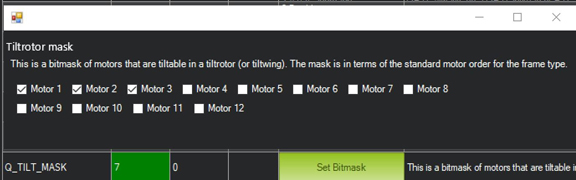
The bitmask value for Motors 1,2 and 3 is 7.
1 Like