Hi
I just build my first tail sitter, and i wonder what should be Q_FRAME_TYPE which is set to 1 by default.
As far as i understood, it does not matter when Q_TILT_MASK is set to 0.
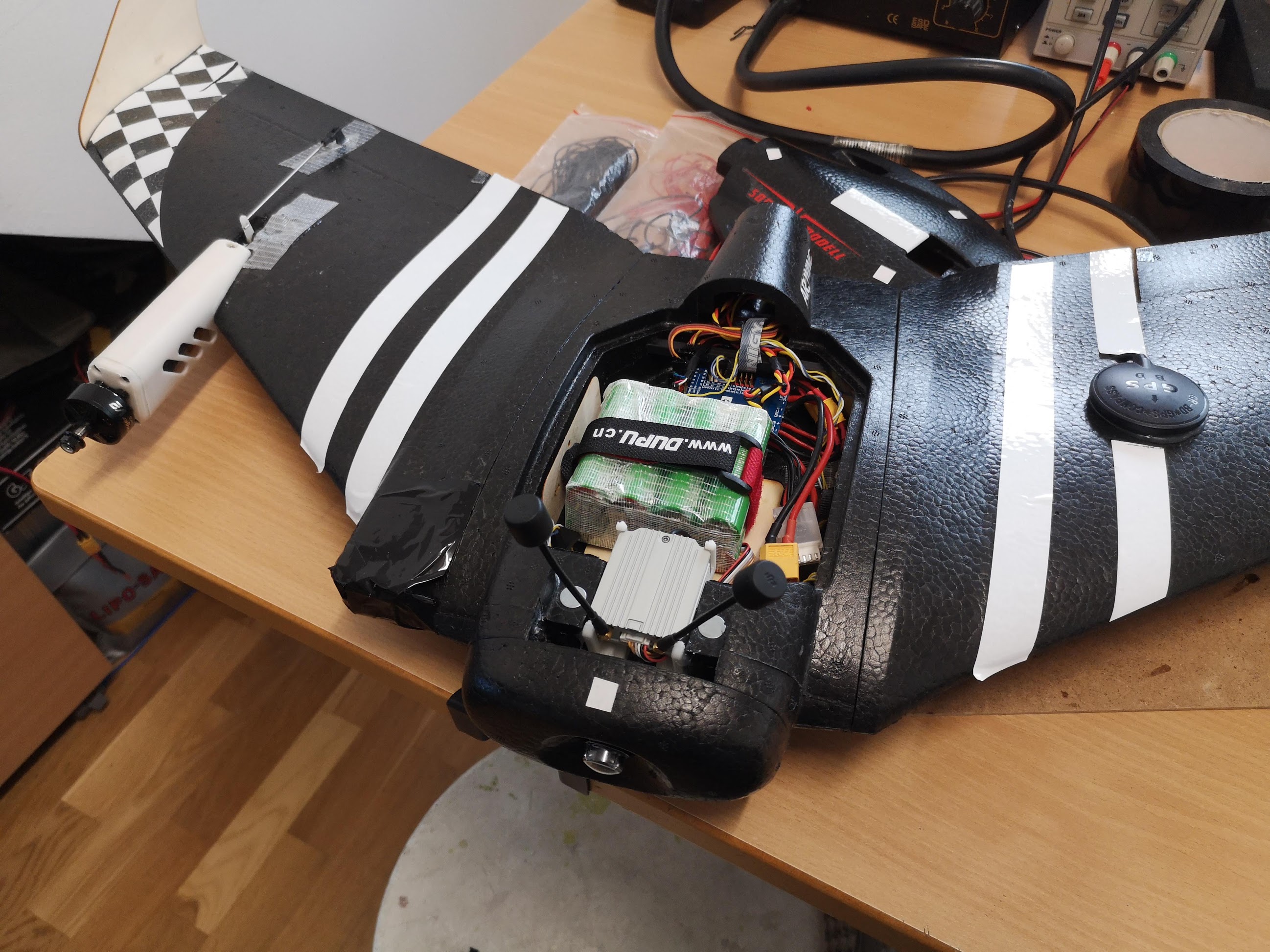
Am i right?, my frame is very simple, just flying wing with two motors on leading wing edge…
And one more question, after upgarding to version 4.x or maybe due to enabling quad plane functionality SCHED_LOOP_RATE has been changed from 50 to 300.
Do i need to worry about wixed wing tuning which was done with sched_loop_rate = 50 ? Does it affect somehow, let say pid integration time, etc…?
In the tailsitter wiki you can read:
The tailsitter backend is a bit unusual, as it is the only Q_FRAME_CLASS setting that may not have any multicopter-style motors associated with it.
It means, Q_frame_type does not matter as soon as q_frame class=10 and Q_tailsit_motmx=0
Q_tilt_mask is not a tailsitter parameter
I dont know about loop_rate.
thank you very much.
Hello again,
Finally i was able to perform first flight but it looks like PID which had been set for my wing, when it has only pushing motor are too high.
It looks like following
I was trying to hoover using qstablize mode and it works quite good with default pid setting, and then switch to stabilize, but as you can see, the plane start oscillating. But it stops when motors are off, during gliding. I think that air flow from spinning propellers increasing elevon efficiency, and that it the reason why it glide ok, but when motors are switech on, it’s not.
What do you think?
What should be next step, should i try to reduce P and D or maybe try autotune ?
Below you can see current pid settings
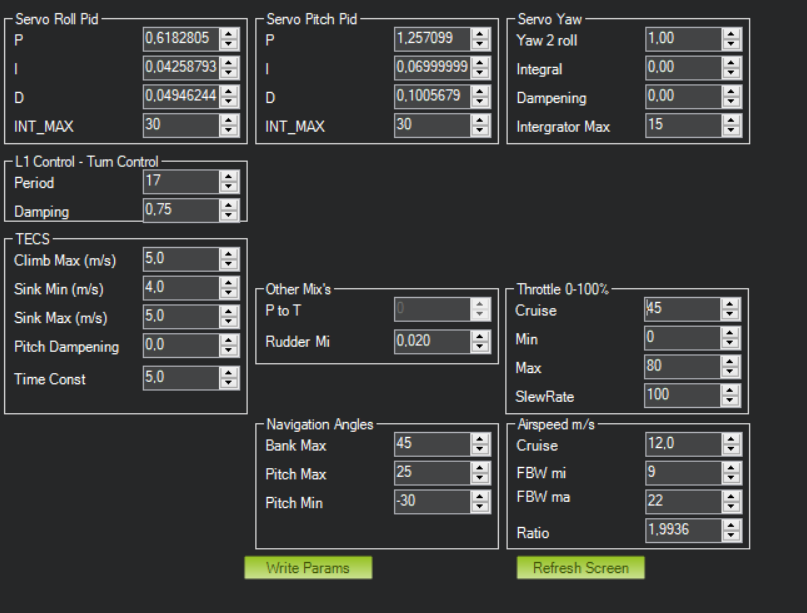
Thank you in advance
Kris
I think you have a trim problem in hover mode. right after takeoff your wing want to lean on its back. If you look at PIQP_I you will probably see that I built quickly after takeoff. You first need to find a solution to hover your wing with PIQP_I around 0 and control surface with almost no deflection. I would look first at CG position along the vertical axis and maybe add a little pitch down to motor mount.
This bad balance is probably the reason why your transition to FW produce this sudden pitch down.
Tuning the FW flight is easy with autotune.
Tuning hover and transition is an other and long long story…, I suggest to look closely at logs to understand how transitions and hover is working. But remember that the frame itself is very important and you can not expect a result beyond frame capability.
Thank you for your answer. I can only add that there was wind in the direction my wing flown just after takeoff.
How should i check cg position along vertical axis? I was trying to hang the plane on two strings attached to motors and it looks like motor’s axis is pitched down, but I’m not sure if my measurement make sense…
.

The belly of the plane is on right side of the photo.
Kris
Wind may explain takeoff behavior but not the transition.
Fly your wing in Q_hover mode without wind and do not touch Tx sticks and just observe it, it should not drift and control surfaces mean position should be neutral (with respect to airfoil). If not, you can test some modifications.
Ok, I will do it. Still need to wait for better weather 
Thank you for your support.
Kris