I’m trying to implement an omni X boat. I am using the ArduRover firmware.
Mateksys H43 Wing V3 FC, M80 pro compass/gps for FPV drone, 4 Blue Robotics T200 thrusters.
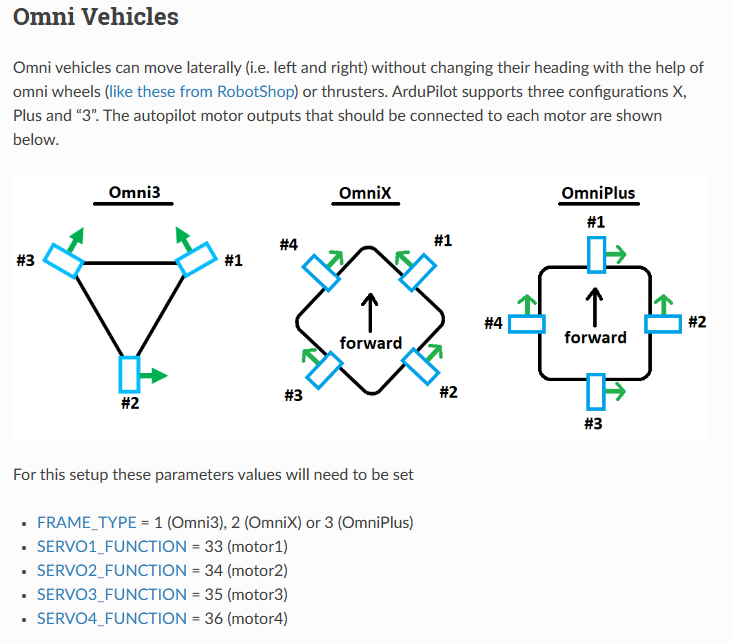
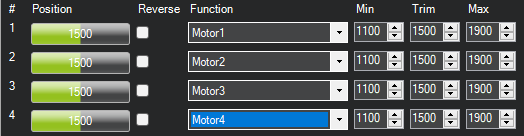
After reading the parameter values to set for omni X vehicles online based on this image below…
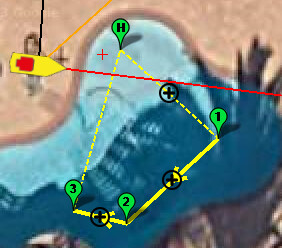
However, when I set the boat to autonomous mode to do the planned mission like below, there is no movement…
Here are some questions/things I noticed and would like some input on:
Only when I set some of the servo outputs to either “Throttle left” or “Throttle right” there is movement. But the movement is very erratic and the boat spins in circles…
I am also concerned by the way the boat position is outside of the pool. There seems to be compass variance issue. Could this be causing the problem?
Also, could it be due to the body of water being too little, say, maybe going to a lake will be better?
What is the correct servo output for omni X boats for autonomous waypoint navigation? I am definitely sure setting servo outputs 1-4 to motor1, motor2, motor3, motor4 doesn’t really do anything in my case…
Here is a list of servo outputs I have tried with no luck:
throttle right, 2. throttle, 3. throttle, 4. throttle left
Hi, I have the same issue as yourself. I am using Omni3, for a boat with 2 rear motors, bow thrust and rear rudders.
I found that it does work on version 4.2.3, but definitely there is no output, in manual mode for the newly released version 4.4.0.
The developers are aware of my issues, but their answer “implies” that if only some of the motor tests work, then just press on, ignore that it doesn’t work at all in manual mode, and stick it in a craft, and go for full auto mode, with the tuning as required.
I have proved the issue is not a problem with the TX/RX, as a different radio has the same problem. It seems despite assurances to the contrary, that OMNI is not yet functional in both OMNI3 or OMNIx variants, in versions after 4.2.3.
Good luck!
This is more consistent with expectation on a new vehicle (manual mode works but automation may trigger failsafes due to lingering config and calibration issues). I know the previous responder is frustrated, but he seems to be blaming firmware and developers for what looks like a configuration mis-step. There were significant parameter changes between 4.2 and 4.4, but there was almost zero change in the output handling, if any.
Need a log file from @jjeerryy to see what’s happening.
Hi Yuri
Certainly there is a level of frustration, but that is mostly with myself, for not following the guides properly. I do not blame anyone for my configuration mis-steps. I apologise if that is the perception.
My problem is that I believed I had followed exactly the same steps, following the instructions, with V4.4.0 and the beta versions, as I did with v4.2.3, on both a Herelink/cubeOrange+ and X8M/PIX32 v6C.
The result is that I cannot, and have not yet got a servo output in manual mode, when armed, on v4.4.0, but can with v4.2.3.
As I “have made a configuration mis-step,” it would be good to know where?
I don’t know the answer to that but tried to provide as much detail as possible in your other thread and even looked through the source code to confirm a lack of changes that would impact omni frames. As this topic seems to indicate another user has successful output in manual mode, I stand by my assertion that there is an issue with your configuration.
@Colechr, I feel I owe you a slight apology here, since there was indeed an issue beyond just your own setup. I did do quite a bit of digging into the source, searching for a change that would explain your problem, but I didn’t go back more than a year, when the bug was actually introduced. Happy new year, and I hope the upcoming procedure goes well for you!
Many thanks, but I am not unlikely to have completely missed the point, and probably will again!
I will try the v4.5-dev, though not for a few days or so. Hope the bionic eye works, or I may have to get the LIDAR working sooner.