A friend of mine and me are just trying to parameterize AP for a motorless glider. The goal is not automatic thermaling, but if you lose LOS in MANUAL MODE or FBWA, you should be able to come back in RTL (as long as the glide path is sufficient ) .
In doing so, we were hoping with TECS_SPDWEIGT,2 TECS_OPTIONS,1 ARSPD_FBW_MIN,9 ARSPD_FBW_MAX,22 TRIM_ARSPD_CM,900 and THROTTLE_NUDGE,0 , that the glider would try to fly at 9 m/s in autothrottle modes and naturally sink only a little bit.
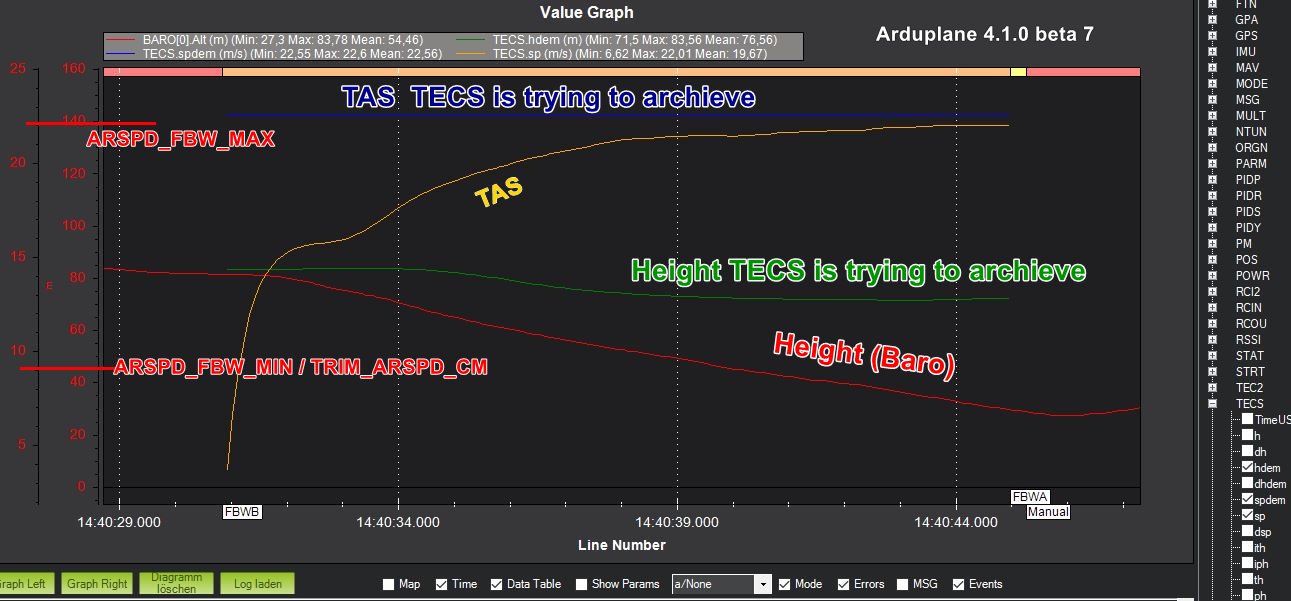
But unfortunately TECS tries to reach ARSPD_FBW_MAX immediately after switching to FBW-B and of course loses massive altitude. Here is a graphic from the logfile (with a shot FBWB Part) :
TECS tries to reach the maximum TAS instead of flying at 9 m/s as desired.
There is no airspeed sensor installed, Arduplane version is 4.1.0 beta 7.
Logfile of a flight and parameter file: MagentaCLOUD
It would be great if someone could tell us what we parameterize wrong.
Or is it necessary to activate SOARING and try to adjust the SOARING parameters for a glider without motor ?
I have taken a look at the Soaring Wiki. When you switch to RTL, however, the normal engine control takes effect again with the problem described at the beginning of the thread (TECS tries to reach ARSPD_FBW_MAX) .
As a workaround and for testing, we will next set ARSPD_FBW_MAX to TAS for best gliding
The matter is solved.
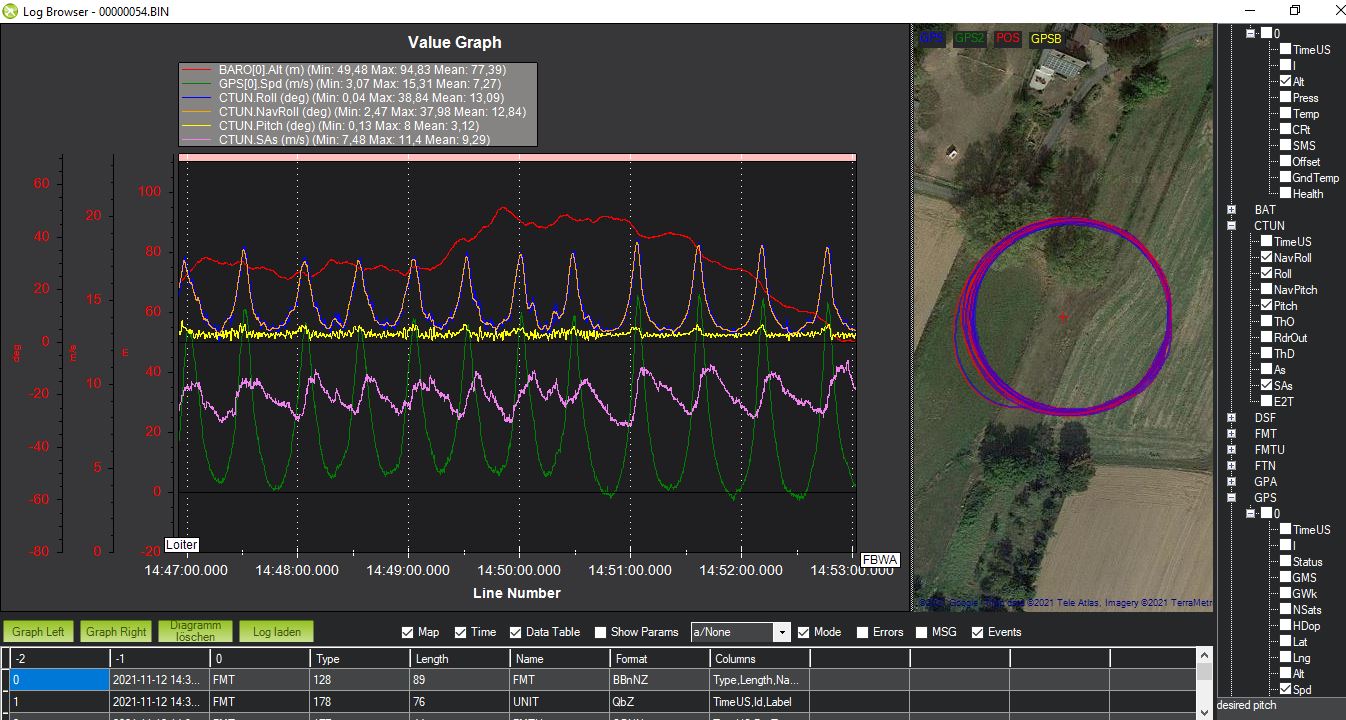
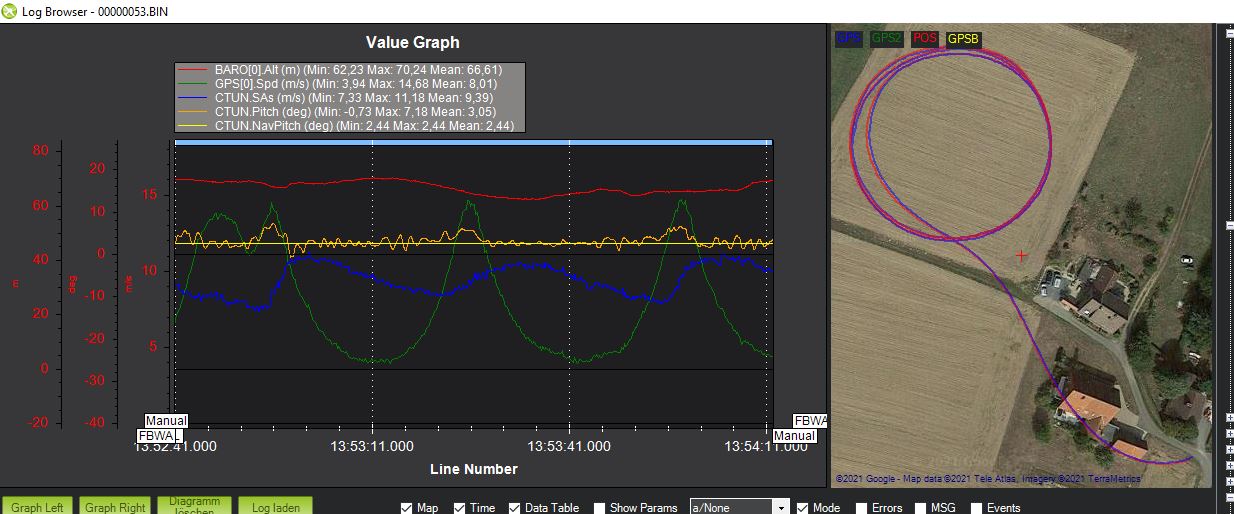
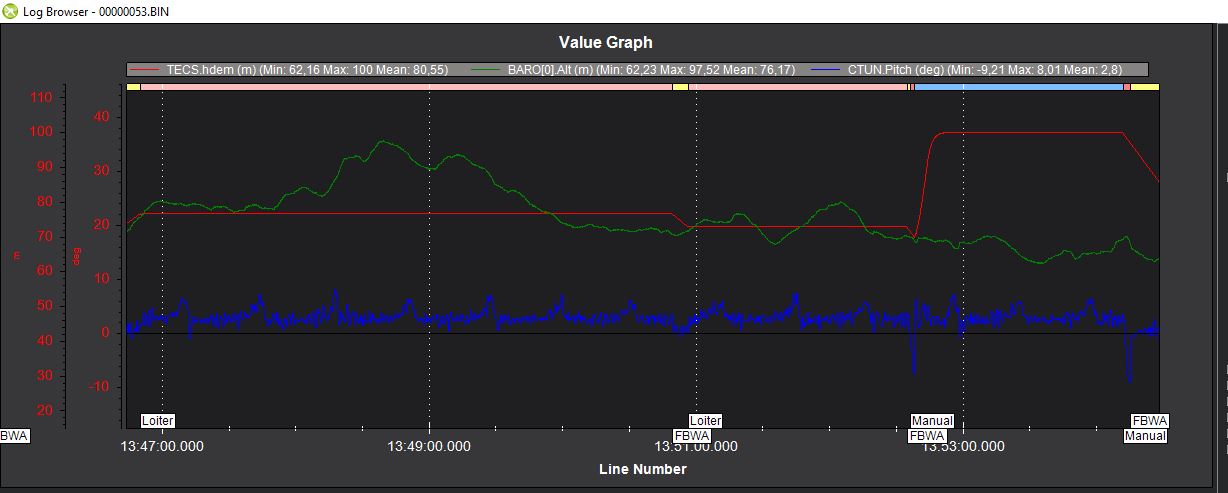
As “workaround” or better “trick” to use Arduplane’s manifold navigational capabilities like RTL, CIRCLE, LOITER and even AUTO Missions (all with autothrotlle functionality) simply for a motorless (!) glider is to limit the possible TECS controlled pitch to a minimum range, between which the glider still glides well without losing too much altitude or speed regardless of any desired altitude.
Examples from test flights with a 3.7 m glider during hang gliding (no thermals) for RTL and LOITER:
 ) .
) .