I have 2 Trex 450 :–
1st one — flybar running Pixhack (Arducopter 4.0.5),
2nd one — FBL running APM2.5 (Arducopter 3.2.1)
After turning the knob (CH 8 controlling motor speed) to around 1560 pwm (range in both heli is roughly 1010 – 1950 pwm) and taking off in Stabilize mode, the heli is rather stable especially in light wind condition. However, changing the collective will make the tail vibrating up and down (not left and right).
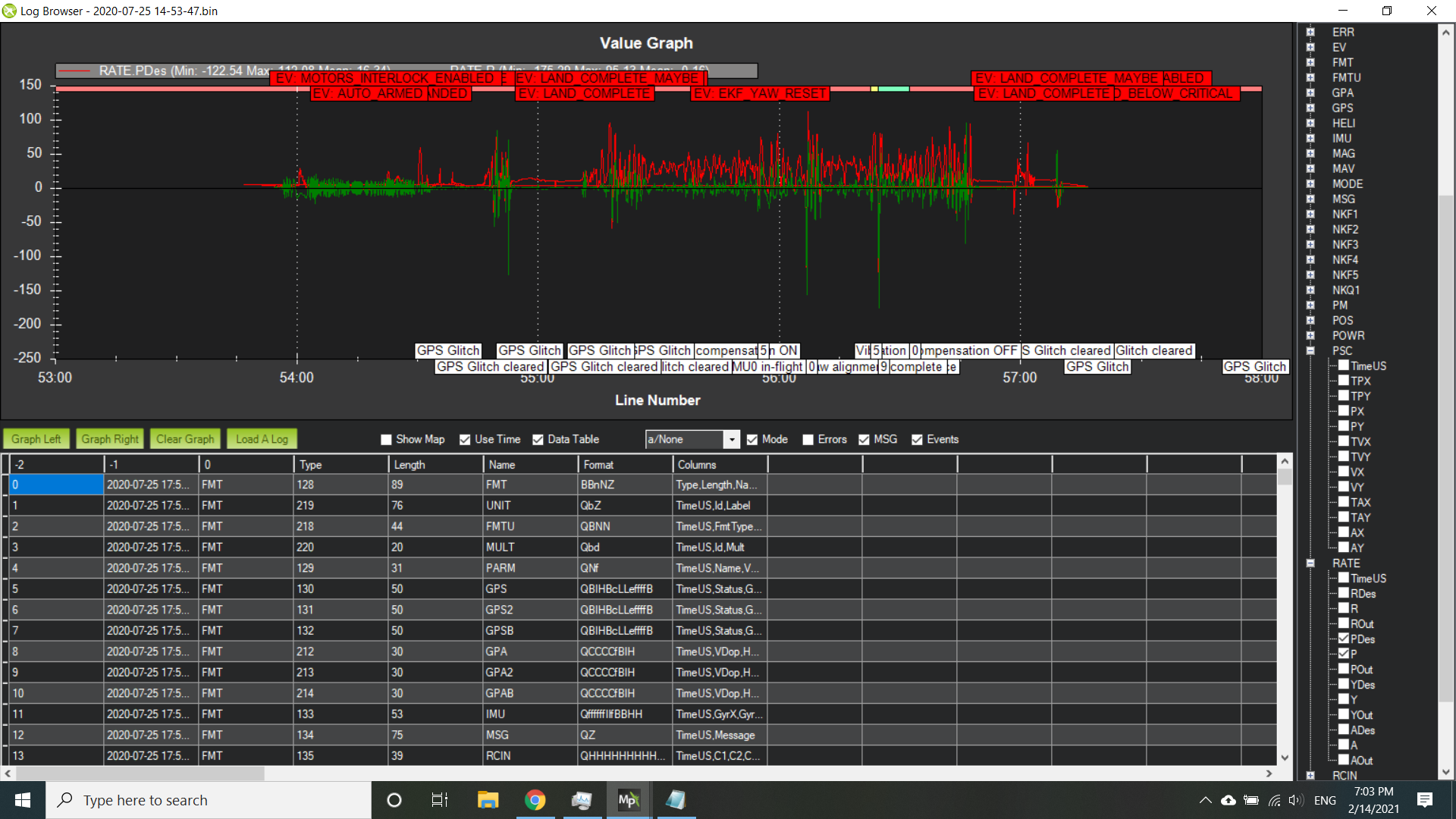
I have added one more bearing to the torque tube to both heli, and a suitbale vibration damping mount is installed to APM ( Pixhack has a built-in damping structure), so vibration is not a factor. It is also shown in log which is within spec.
Can anyone shed some light on how to adjust an optimum rotor speed to avoid tail hunting, or is this inevitable because of resonance phenomena due to changing the collective (thus speed of rotor) will coincide with the natural frequency of the heli ?
Which is the parameter to reduce the tail gyro gain ?