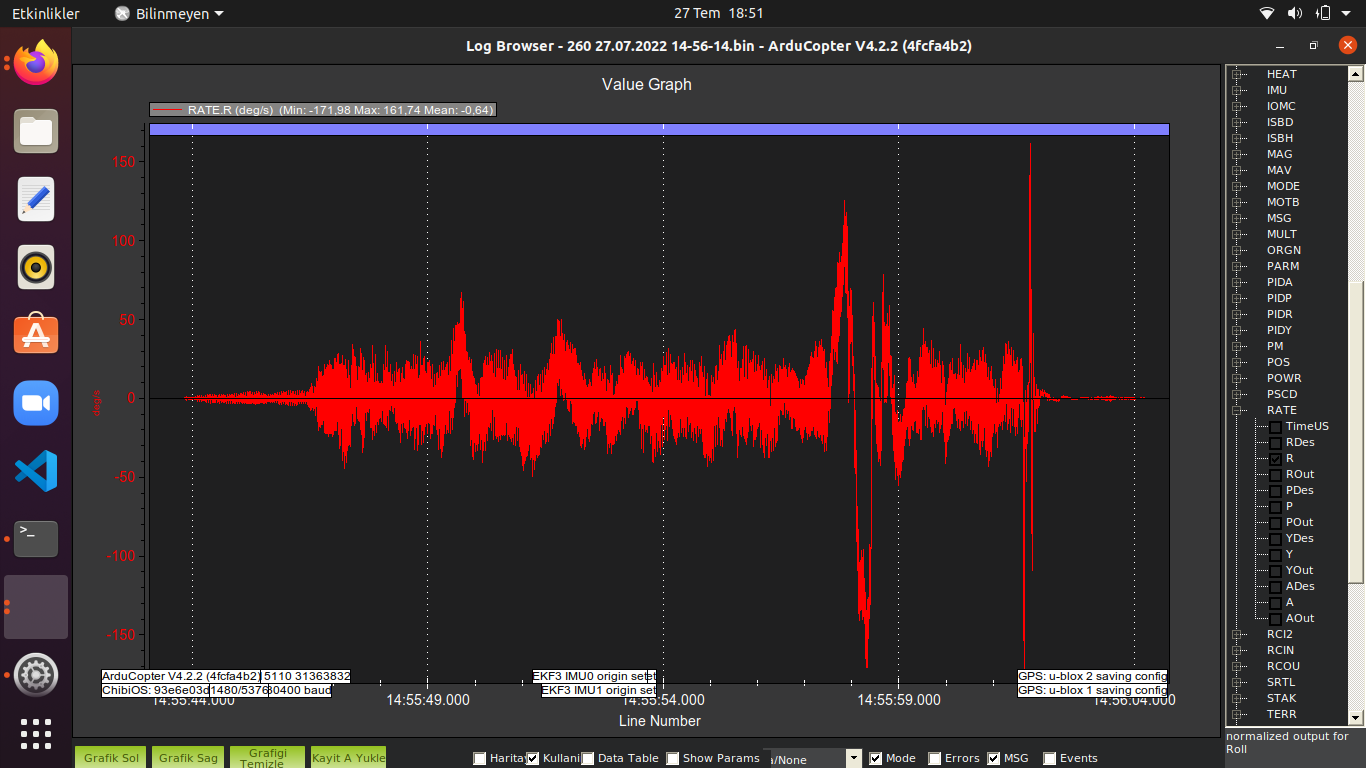
I have a copter and I can’t autotune it. I have tried a lot of roll/pitch pid values. But there is a lot of oscillation whatever I do. example:
The problem is: I can’t see an oscillation with my eyes. So I am looking at logs every time. Today I thinked may be the problem can be stabilize p value. But I don’t know the difference and also I don’t know is there any other logs about just angle or something.
Some atc paramaters:
atc_ang_rll_p:4.5
atc_ang_pit_p:4.5
atc_rat_rll_p:0.075
atc_rat_rll_ı:0.050
atc_rat_rll_d:0.006
atc_rat_pit_p:0.075
atc_rat_pit_ı:0.050
atc_rat_pit_d:0.006