Your voltage failsafe levels might be wrong, since the battery voltage really drops off at the end of that flight. An RTL is initiated but you cancel it by mode change, and you are really into the critical voltage area.
Apart from graphing the voltage to see the fall near the end, you can see in the motor outputs → there is a noticeable increase in motor outputs over time as they are commanded to higher output to deal with the falling voltage. This will be drawing more current, and making the voltage fall faster…
This is why all the correct voltage failsafe values and actions need to be put in place, because you cant see these effects “by eye”. When a pilot gets busy, watching a voltage and doing calculations in your head is impossible.
EVEN DURING TESTING
The battery pack will be damaged, or at least lose capacity, if this is repeated.
Definitely set BATT_FS_CRT_ACT,1
I think you will need some conservative voltage settings, or least a short timeout value.
BATT_LOW_TIMER,5
Try to get the current monitoring working too, that will be useful information.
What kind of battery pack is it?
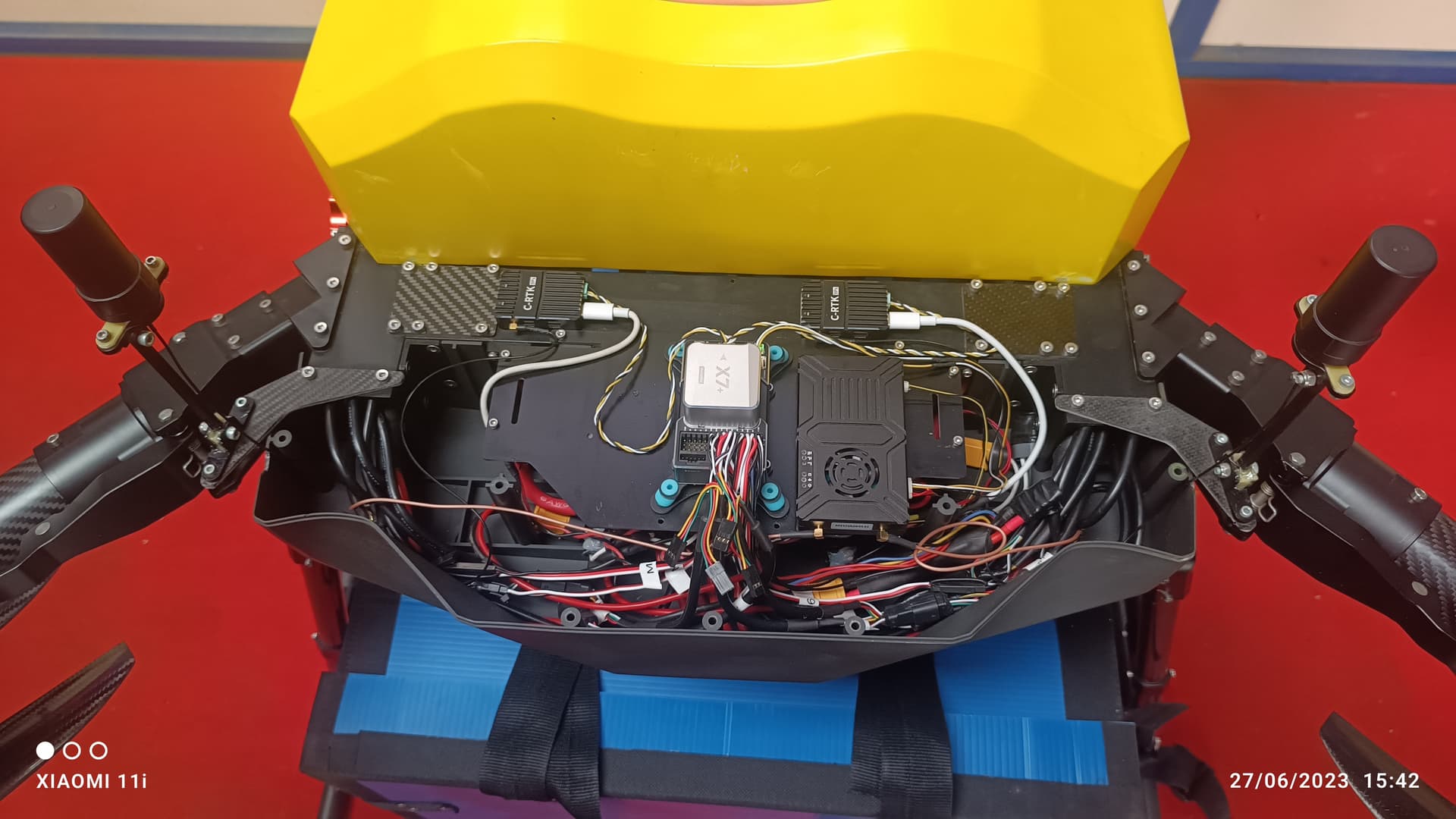
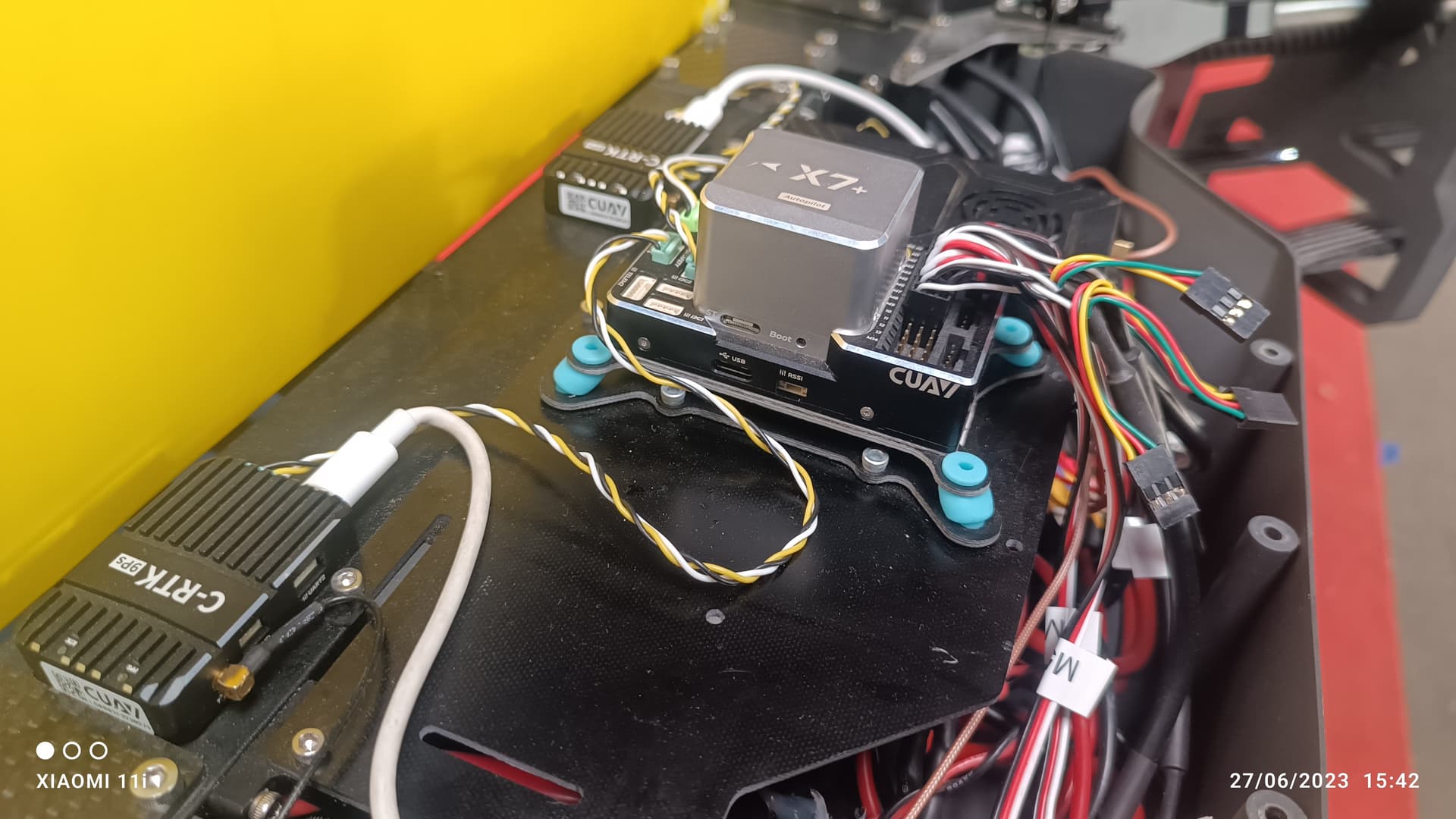
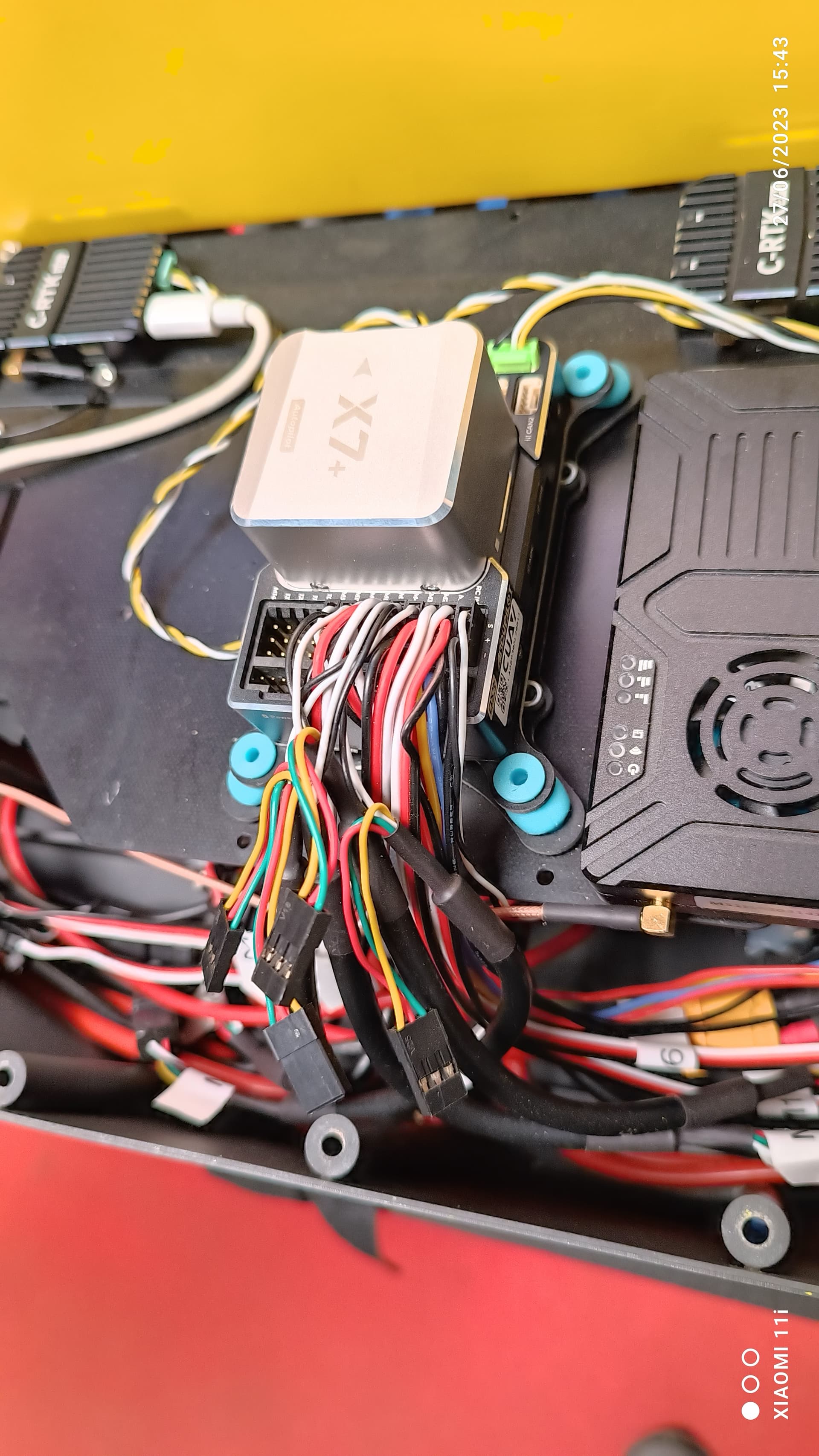
The vibrations seem a bit excessive, particularly because X and Y axis vibes are very unequal. This indicates damping is not equal in all directions, or something is pulling or rubbing on the flight controller.
You should do more to reduce vibrations.
Please also provide photos of the flight controller, its mounting and its wiring.
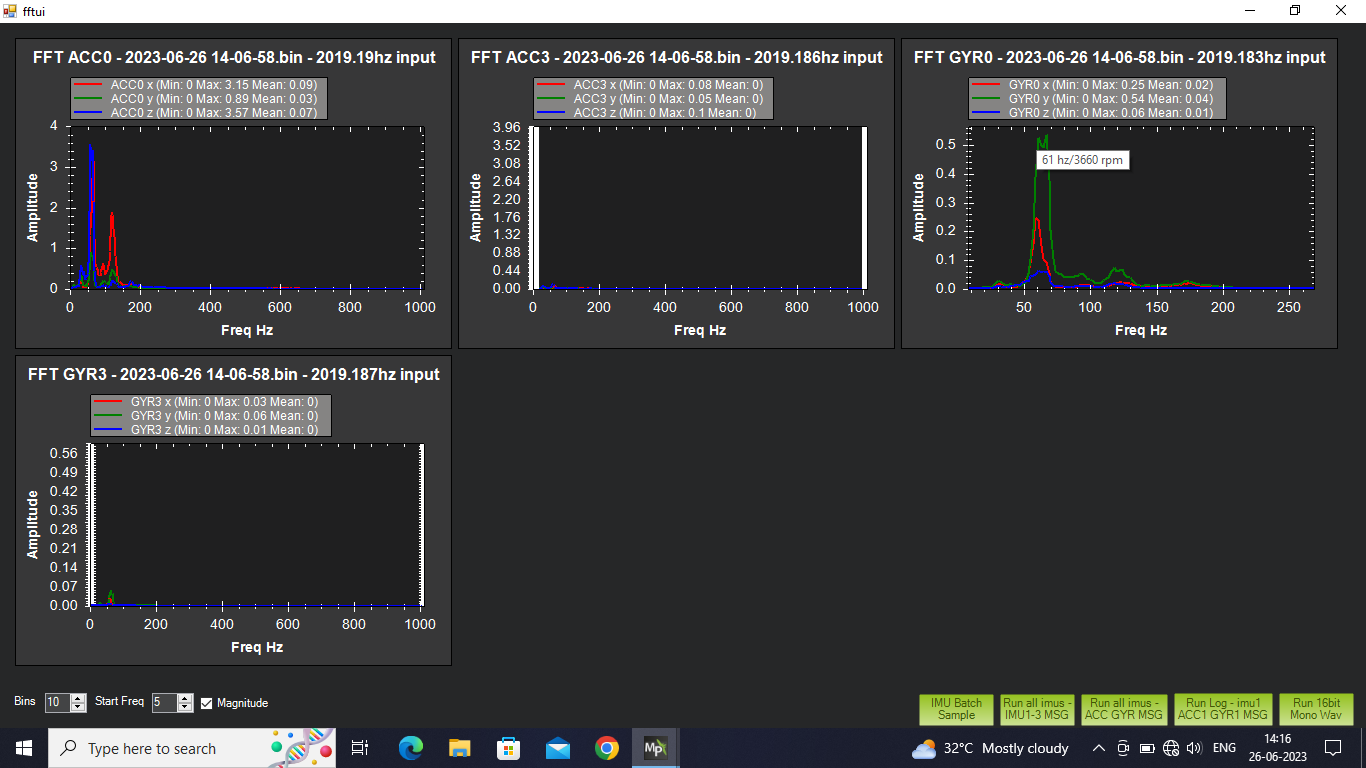
The harmonic notch filter settings are wrong - a harmonic is targeted instead of the base frequency. Set these - and leave the logging values in place until every bit of tuning has been done.
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.26
INS_HNTCH_FREQ,29
INS_HNTCH_BW,12
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Attitude control is very noisy, and D term is definitely too high.
Start with this and do a flight with Stabilise and AltHold, don’t rely so much on Loiter yet.
ATC_INPUT_TC,0.20
ATC_RAT_PIT_D,0.0055
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.0055
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_P,0.11
But dont rush into doing further flights until you’ve attempted fixes for the vibrations - vibrations are a physical issue that often cant just be tuned out.