Hello). The following case occurred during test flights.
Configuration of the copter:
Arducopter 4.3.2
There was a flyby of a large multicopter like Agro type, on which the GPS module was turned off. Mode was used AltHold. The copter was controlled as usual for some time, but at a moment it began to gain altitude sharply. He did not respond to control.
The pilot decided to disarm in the air over a safe area where there were no people. Only telemetry logs are available for analysis.
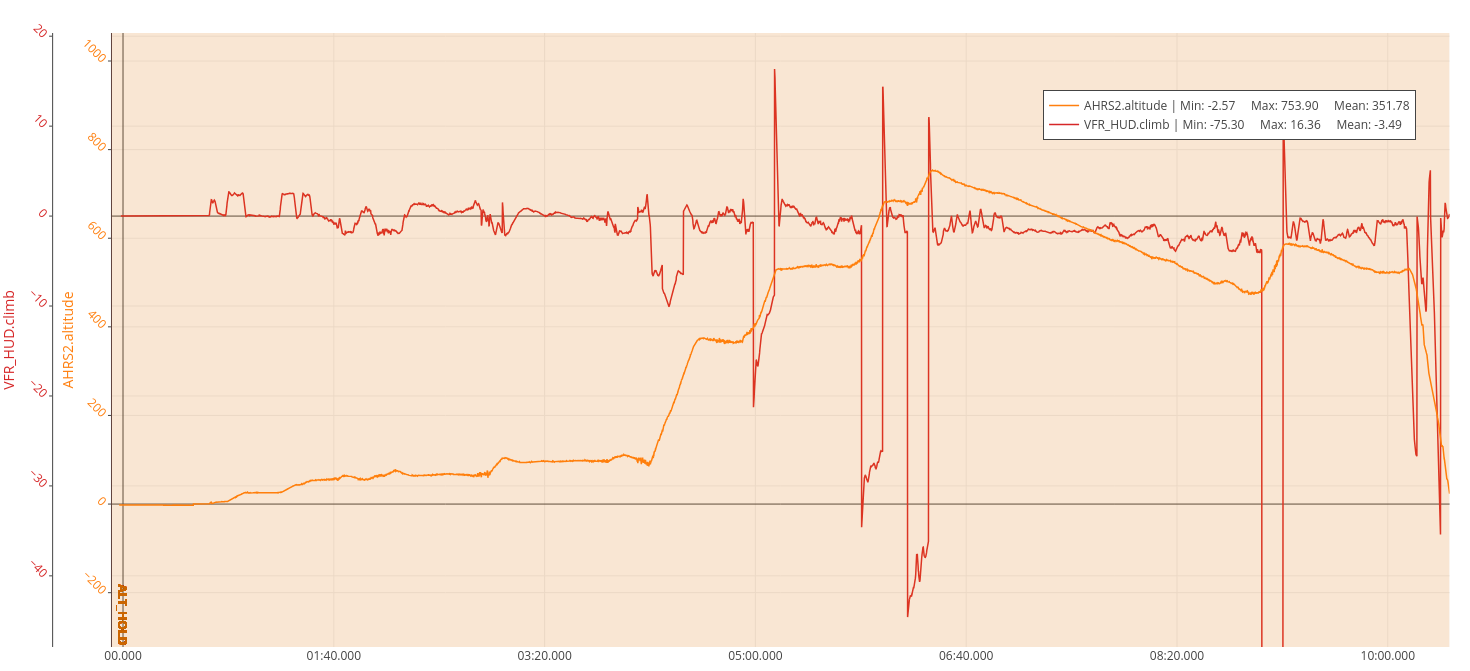
As can be seen from the graphs Climb Rate, he really thought he was falling and revved the engines at full power.
This was accompanied by appropriate messages Potential Thrust Loss.
In the simulator, it is possible to reproduce similar behavior, if the malfunction of the accelerometers is simulated with the GPS disabled.
Question:
Why is the copter not guided by barometric altitude as a source of real altitude in such cases?
Why was he not satisfied with switching to another “lane switch”?
In which mode is it better to drive if something happens to the railway (perhaps the AltHold is not quite suitable for this)
Thank you! I would be very grateful for help in analyzing the log file and clarification.
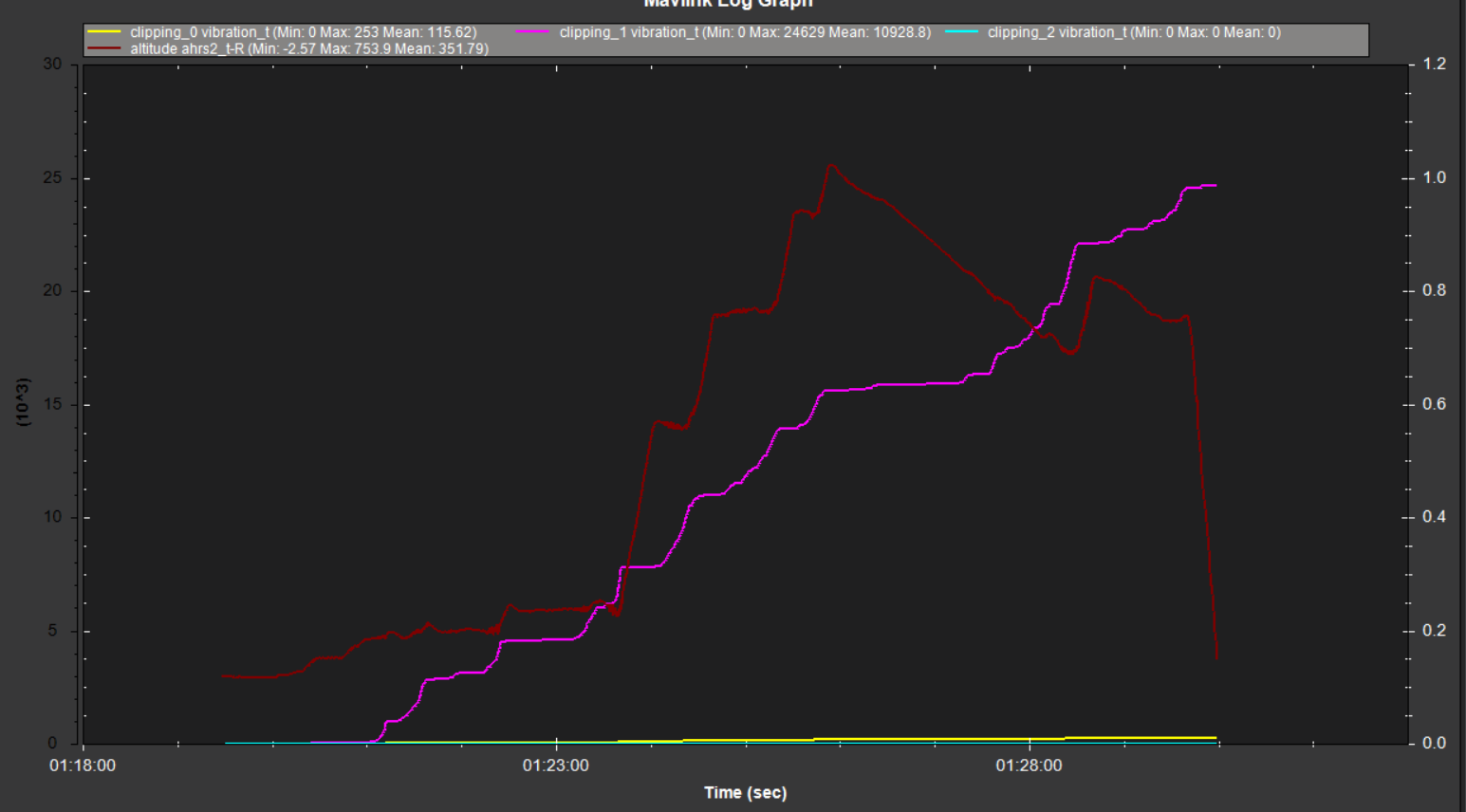
That is caused by excessive vibrations, making the flight controller believe it is falling.
Normally EKF would soon realise that baro and GPS agree, and accelerometer is wrong. This would trigger the vibration failsafe and allowe controlled descent. Without a GPS the EKF doesnt know what to believe.
If you switched into Stabilise mode you would have been able to take control easily - everyone needs to have Stabilise mode ready to go, and practice using it. Stabilise mode only tries to stabilise pitch and roll in a basic fashion, you are in complete control of overall motor output, this can make it difficult to control, hence the requirement to practice.
Thank you very much for your quick reply. You confirmed my observations.
Please tell me more. Why wasn’t there a sharp rise up to a certain clipping level (6000+)?
And the level of vibrations at the transition moment does not differ too much.
Thank you!
Clipping is a count of the times the physical abilities of the accelerometer is exceeded, so the count could increase over time. Vibrations are an instantaneous measurement from the accels, and is the mortal enemy.
Vibrations indicate a physical problem that must be improved before tuning can progress.
Good day. I still have the same question. There is such a parameter EK3_SRC(1)_POSZ. Baro is selected. What does it affect other than maintaining altitude using barometer
Thanks a lot
Did you fix the vibrations?
There is no option, changing parameters wont fix a physical problem, especially when a multirotor depends on the accel and gyro readings more than anything else.
The baro certainly has some weighting, but the accel is telling the copter it’s falling - so who to believe?