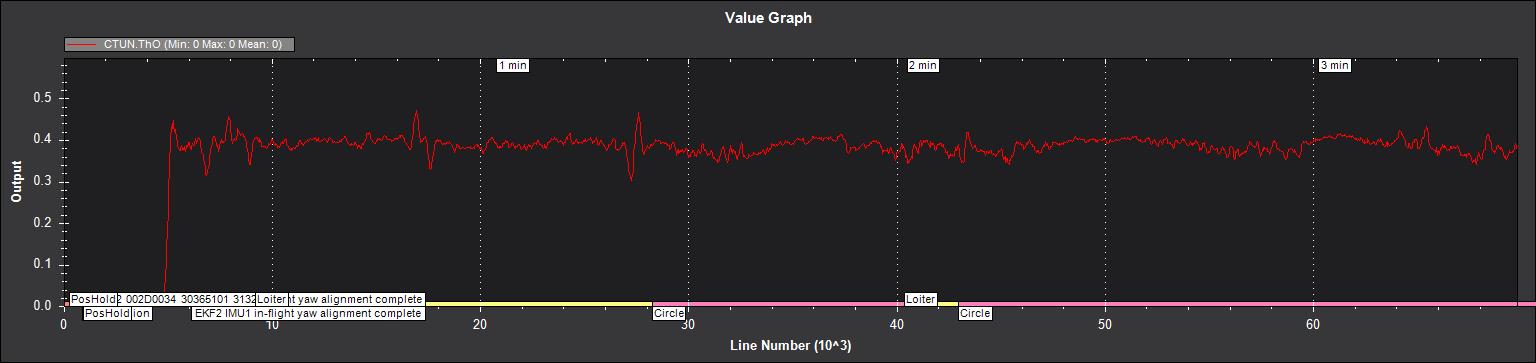
I am trying to realize at what throttle my copter is in normal flight:
On one hand I look at the ch3percent and see ~40% (see THO.jpg enclosed).
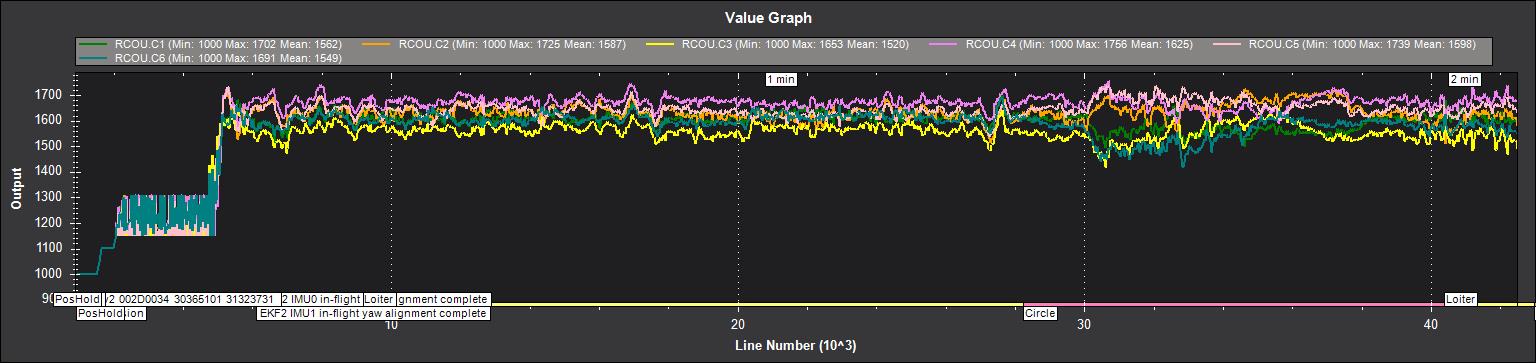
On the other hand, I look at rcout_ch1-6 and see mean pwm values of 1550-1600 (see RC_out.jpg).
If the min pwm is 1000 and the max is 2000 - then ~1600 means 60% ?!
[note: I plotted the start of flight graph to show the power off pwm state (1000) and the arm (motors on the ground) pwm state (~1200) before actual take-off ]
Could you please explain how these 2 graphs settle?
The way I think about it is that your FC has an effective PWM control range of 800 (2000-1200) to “choose” from.
Your throttle out of 40% means it hovers at 40% of that range, so at 320.
If you add to that to the minimum PWM of 1200 you get to 1520, which is pretty close to your RC out values (look at the yellow one line).
So RCout ~= PWMmin + (PWMmax-PWMArm)*ThrOut
In reality there are some other influencers like Expo Factor, Voltage Throttle Scaling etc - but the above is the basic formula as far as I understand it.
May I ask @arikarbel what motivated the original question, and how you will use the resulting knowledge when you have it? I am thinking that the two different graphs of known information should not necessarily be a concern unless you wish to use the values in a way that controls your flight or the performance during the flight. Then, I would think you wish the control you then apply to be the most beneficial.
What prompted your question?
@HensenJC : The motivation for the question is simple: I want to evaluate the state of the motors - i.e. at what percent of their max thrust they are in different stages of the flight (take-off, hover, etc.).
This enables to asses the rpm and thus the current and to compare this set-up with other possible set-ups (motor, prop).