I have a digital airspeed sensor @ 0X28
A compass @ 0X0D
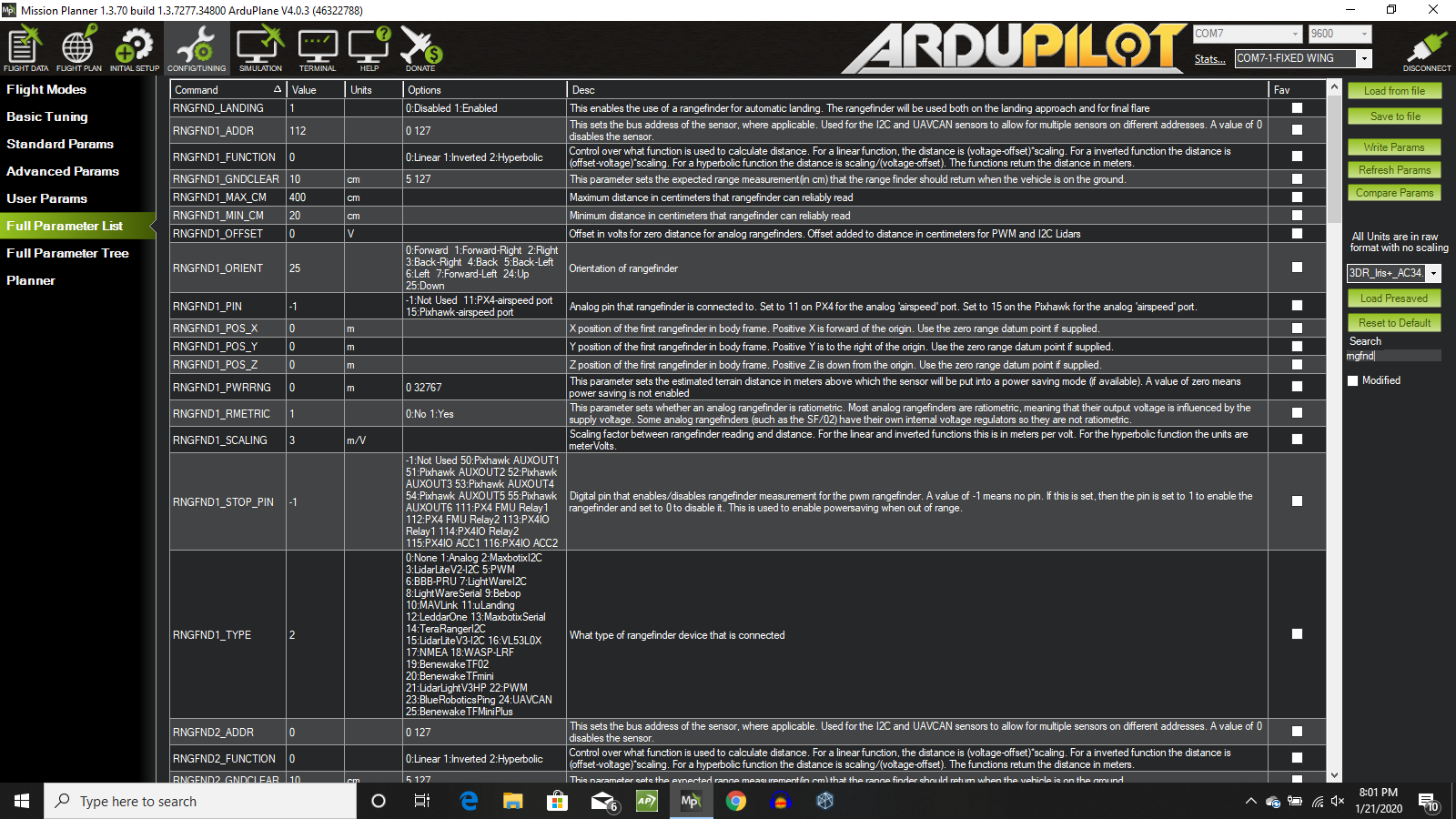
Rangefinder @ 0X70
and a display on 0X3C
It feels like I am trying the wrong thing here, cannot find support for them.
Using a Minipix FC
Is there a better version or what do i do wrong here?
I tested only the rangefinder, set the address to 112 and selected the matbotix i2c which should be supoported and filled in all the other fields, saved the parameters and restarted the fc, connected, checked all the parameters and nada. How can I see what the fc sees? Or do I need to scan the i2c bus to see what happens?
Hey,
there is a dedicated wiki-page for the setup of the Maxbotix I2C rangefinder. I would recommend checking this wiki page out.
A quick comparison between your setup, and the one described on the wiki-page seems to be similar, except for the parameter RNGFND_MAX_CM which apparently has to be set to 700. The wiki-page also describes how to check the sensor: A parameter sonarrange will appear under Flight Data/Status (once again, that is described on the wiki page).
if you can seee the reading of the sensors in the parameters you don’t have any issue… if you must connect others i2c periph you must the address coz you can have conflicts if they use same add
It seems that you are trying to implement the wrong way.
I mean that you connected your devices to an Arduino and did an I2C scan , which is OK but for connecting to ArduPilot you need to start with the device type and model and set parameters accordingly.
It is hard to guess what is the device type and model by just having an I2C address.