I opened the Plan section on my Mission Planner and saw this symbol. Does it stand for Home? When I tried to fly my drone, the H symbol and the drone symbol does not coincide. Is there a calibration problem I should fix? Please let me know.

It is for the home position. What do you mean that they didn’t coincide? It will update when you arm the drone if you have an accurate GPS position and the EKF is settled on it’s position.
If you have all the arming checks on, and are using a geofence then it should be on target (minus GPS error)
1 Like
Hi, thanks for the response. I had to ‘force arm’ my drone to actually enable my guided mission, is there anyway i could fix this arming issue?
Also during guided mission, it sways a lot during flight, any other options I should edit?
That’s a big clue. If you have to force arm it means the drone hasn’t passed all the arming checks. In this case I’m going to guess it’s the EKF position. Could be other reasons.
How is the tune? Did you use How to methodically configure and tune any ArduCopter?
You can post the .bin log file for the flight if you want to get some more specific help with the drone.
2 Likes
Hi, i’ll attach the log file of a couple of tests we did. Is there any voltage drop/tuning issues that you could point out?
The very last flight ended up crashing due to insufficient voltage so I am not sure if the battery went faulty or if it happened due to low power.
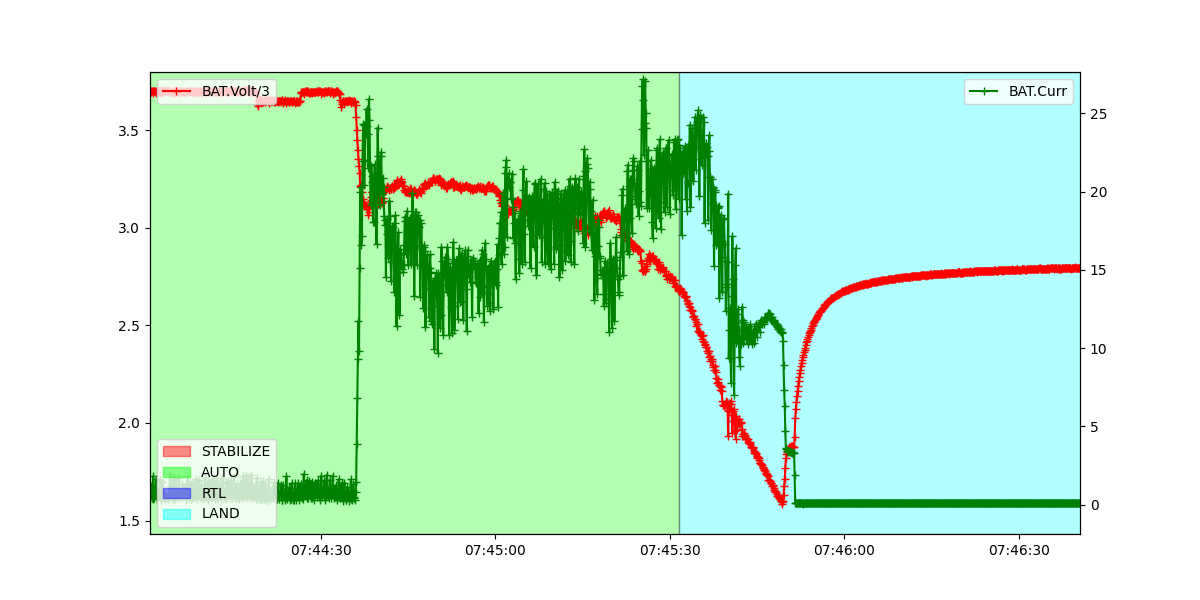
What kind of battery is that? If it’s a 3S Lipo the battery was not charged when the flight was started and flying it below 3.5v/cell probably just killed it off. If it’s 3S LiIon then it was still taken below 3.0v/cell and that’s often considered too low. You can see by the drop in the voltage the battery was just run dead.
Either way, the battery didn’t fail. You killed it.
I feel the battery failsafe parameters are too low. The low_volt is set to 9.9 and it needs to be below that for 10 seconds. Looking at the performance, by the time it hit that voltage it was too late and already started cascading down. The failsafe performed as configured, but it wasn’t correct for the battery.
Reset your ARMING_CHECK,1. If it won’t arm then fix the problem.
Update to the latest firmware.
There’s a bunch of EKF errors in the log. There are some very unusual PID settings (and a bunch of defaults), and no notch filtering. I think this quad needs some tuning and setup. Look at the link I posted above and work through that process.
2 Likes
thank you so much, I’ll look into these changes
My battery is 3S LiPo and yes it had gone through a couple of flights beforehand so that explains the low voltage start, I was worried if the battery itself had some damage. Should I set the low_volt parameter to trigger in less than 10 seconds? I feel like that delayed the sequence.
Also how did you find the EKF errors in the log? Is there a specific parameter I need to look for while reviewing the log files? Thanks for sharing the link above, i’ll start working on notch filtering
If it’s a LiPo then you need to turn the Low voltage warnings up to about 10.8v, not 9.9. Don’t change the timer, change the voltage level.
Follow the tuning instructions I provided earlier. The setup of this quad is wrong, so there’s no single parameter that you can fix that will make it all better.
1 Like