What would be a likely cause when i fly with acro mode. Doing a high speed forward and then do a high speed yaw turn it just turn uncontrollably and loss of power and crash?
I thought its compass issue, fixed it doesn’t work.
Remove compass, still the same?
Maybe wire too thin? Replace thicker wires. Still the same?
Autotune my yaw, still the same.
Check the logs for motor saturating at the max PWM value. (RCOU.Cx message in the logs)
Demanding very high yaw rate during high-speed cruise may make the motors run at full throttle leading to loss of the motors ability to stabilize the roll and pitch axis.
Solution:
Try limiting the maximum demanded yaw rate: ACRO_Y_RATE
Also considering tweaking other ACRO_Y_x params.
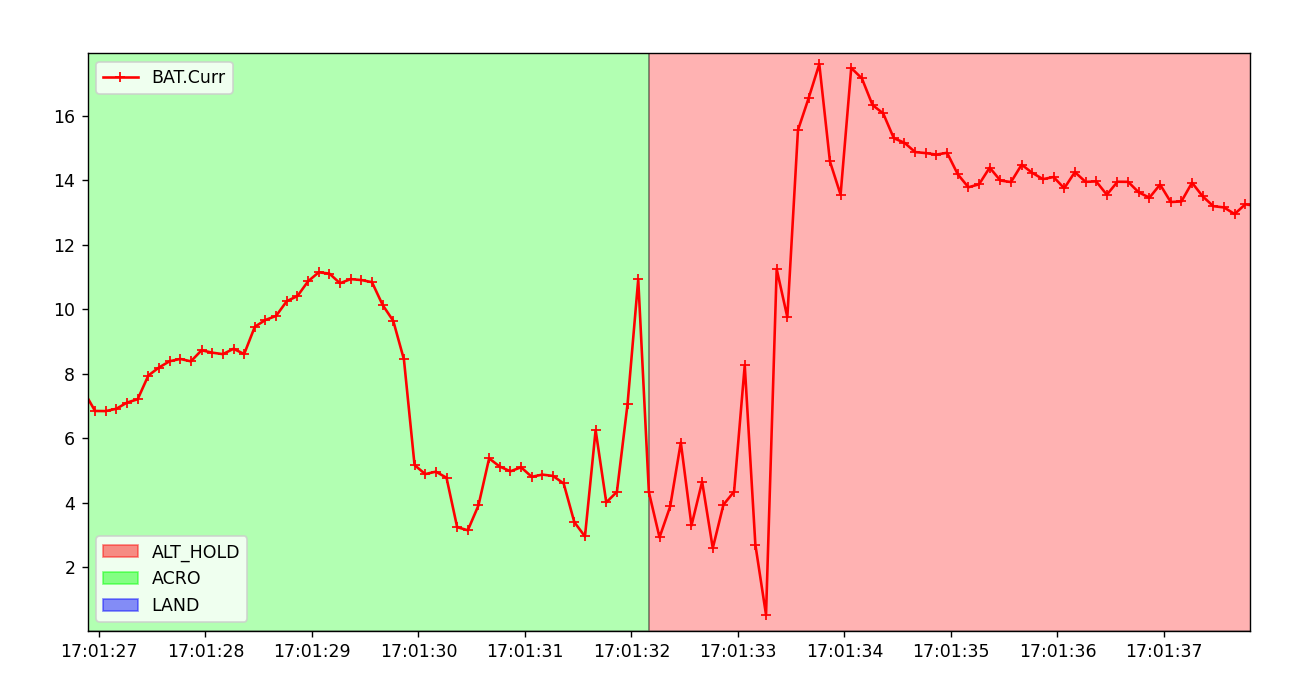
I think motor/esc 3 failed or some how stopped producing enough power. The current doesn’t match what it should as motor 3 goes to full, compared to when the other motors do the same.
Check the wiring to #3, the ESC, the motor itself, the prop nut. The crash wasn’t the result of a tune issue, it was likely a hardware failure or limitation.
I did some more test, what you said the other time is correct one of the wire seems to be off, which I soldered. but still face similar problem with the spiraling when pushing my joysticks… I am trying to learn to read these logs.
I interference and the placement of my FC in a stack is a cause of these.
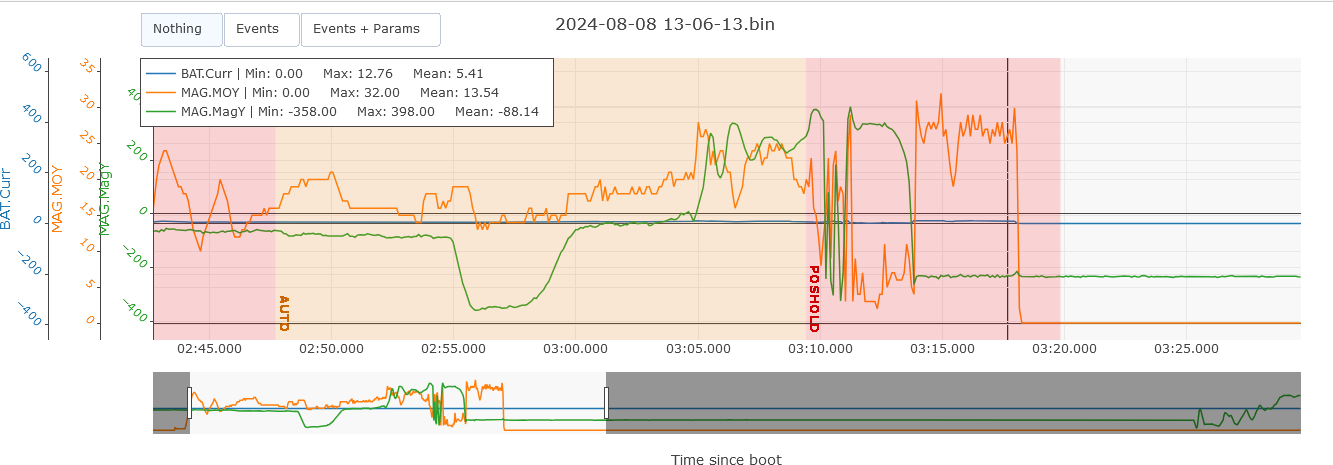
First image is done with a GNSS/Compass.
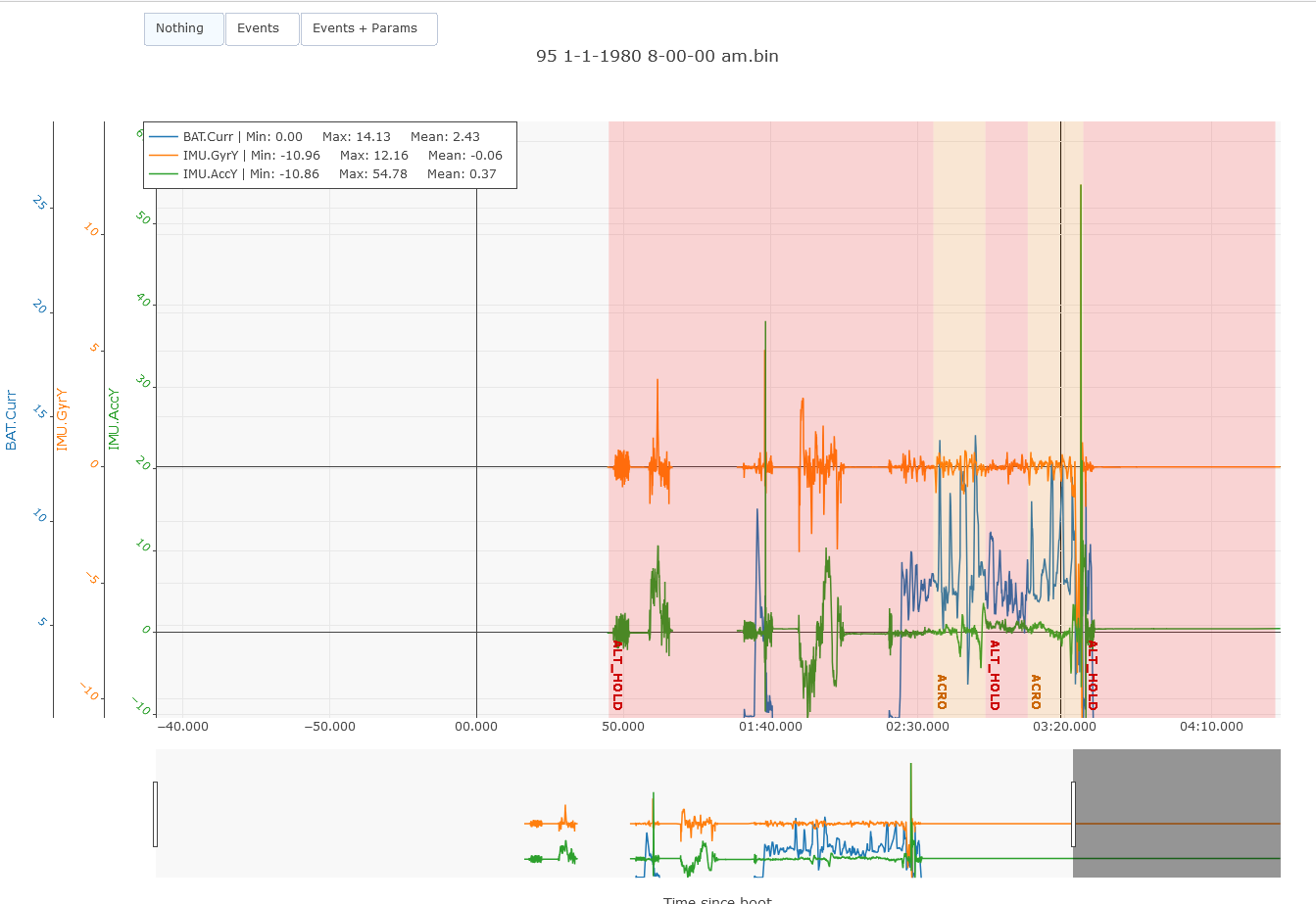
Second Image I removed the compass. but the imu seems to react badly.
Could this be true that the cause of the spiraling also comes from intereferance?
Give that a try and see how it does. Don’t remove the compass unless you re-configure for that, and that involves some other hardware so it’s not a quick solution.