Hi, All
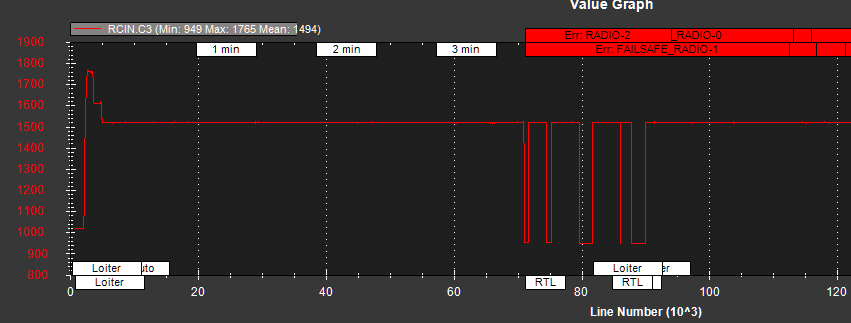
There maybe a problem with RC FAILSAFE RTL, I am using a WFT09 brand RC, when the receiver lost connection with RC, the recerver indicate this event by low the throttle(CH3) below 970, and set all others at MID, this is OK for APM RC FAILSAFE triggering.
The problem is, the moment the copter is losing RC connection(far away), when will be ‘connection TURBULENCE’, that is, the connection may ON and OFF for un unstable moment, chennal output maybe unstable during this period.
I got this LESSON once a time: the copter flew away and a long time not coming back, when I supposed it crashed, it came back— hovering above my head. I checked the log, and found that the RTL mode was updated to Loiter by the mode chennal, and, because this moment the connection is OK already, RC lost RTL will never triggle again, then, the copter was LEFT there, Loitering!!! fortunally, the wind blow it back to my direction, and slow it came back.
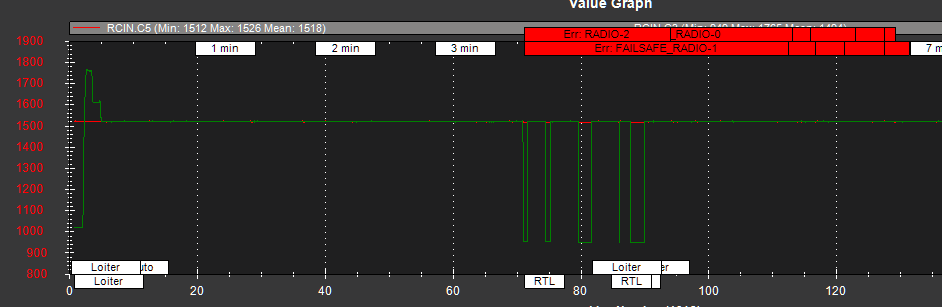
After that, I had set the Loiter mode at CH5 MID position, because when I start a auto mission, I always start from Loiter, with CH5 at MID, in this way, even RC connection lost, the receiver CH5 default output is still MID(1500), then the CH5 mode chennal will not interrupt the RTL mode.
I am happy with this setting, untill today, I was flying a copter 3.4.6 PIXRACER, same WFT09 receiver with PPM encoder, about 970m away,
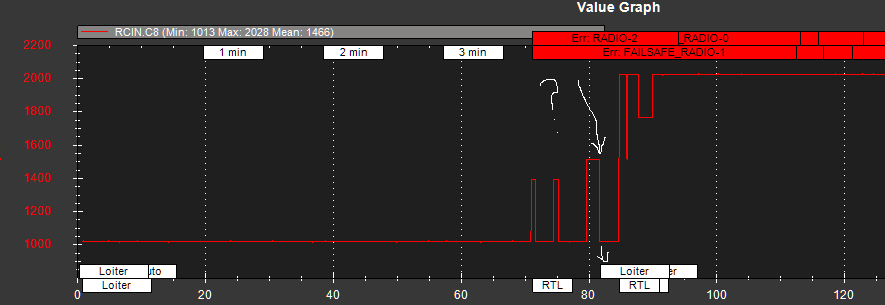
the RC LOST RTL triggled and comming back, but, interruted by not knowing reason, mode to Loiter, fortunaly, I can saw this on telemitry android phone, I use CH8 to force coper to RTL again, and it came back.If I failed to do this, my copter would have LEFT far away, loitering and crash…
Now, can any friend can tell(refer to LOG),
1, what caused the mode change from RTL to Loiter ( I checked and found CH5 no change in MID, my setting is low mid high STA LOITER ALTHOLD in CH5., I use CH8 to trigger RTL forcefully, see attachment, could CH8 MID -LOW edge trigger MODE change from RTL to LOITER? )
2, what is best solution to my above Connection Turbulance Problem?
huilaibianloiter.zip (2.5 MB)